

- 1000.50 KB
- 2021-05-22 发布
实验五 探究动能定理
[实验目的]
1.探究外力对物体做功与物体速度的关系.
2.会用图象法处理实验数据,通过对实验数据分析,总结出做功与物体速度平方的关系.
[实验原理]
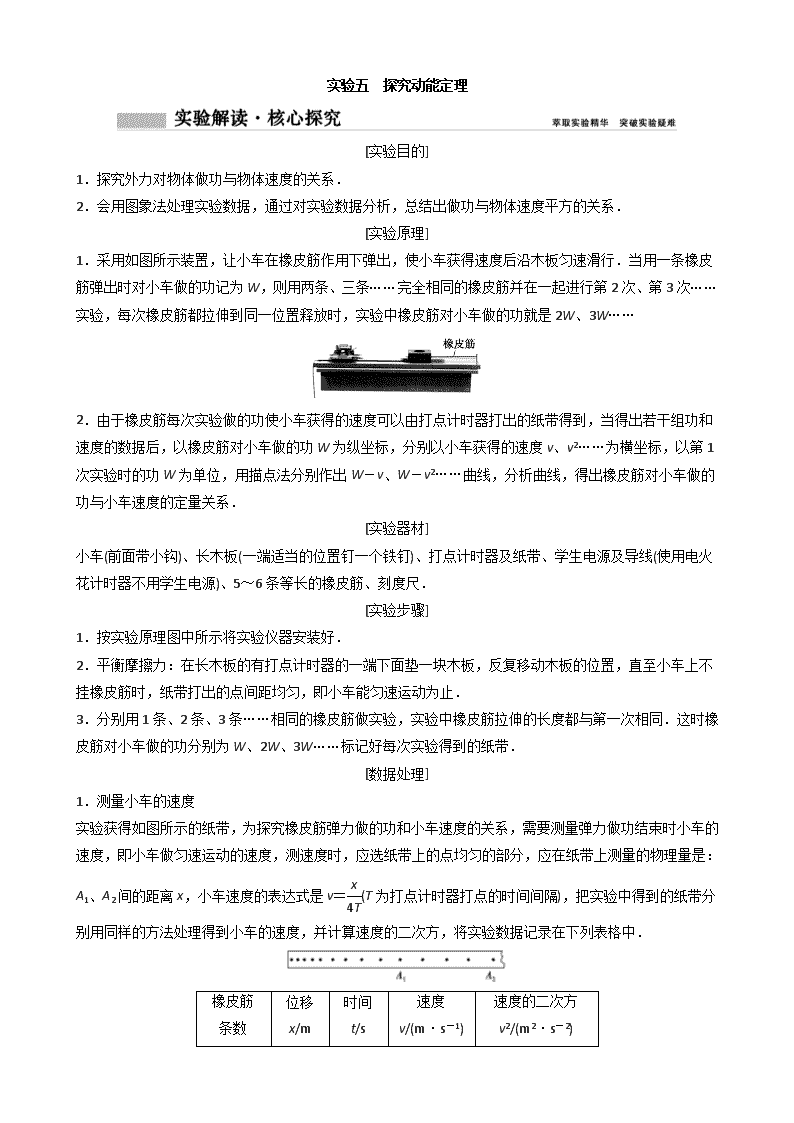
1.采用如图所示装置,让小车在橡皮筋作用下弹出,使小车获得速度后沿木板匀速滑行.当用一条橡皮
筋弹出时对小车做的功记为 W,则用两条、三条……完全相同的橡皮筋并在一起进行第 2 次、第 3 次……
实验,每次橡皮筋都拉伸到同一位置释放时,实验中橡皮筋对小车做的功就是 2W、3W……
2.由于橡皮筋每次实验做的功使小车获得的速度可以由打点计时器打出的纸带得到,当得出若干组功和
速度的数据后,以橡皮筋对小车做的功 W 为纵坐标,分别以小车获得的速度 v、v2……为横坐标,以第 1
次实验时的功 W 为单位,用描点法分别作出 W-v、W-v2……曲线,分析曲线,得出橡皮筋对小车做的
功与小车速度的定量关系.
[实验器材]
小车(前面带小钩)、长木板(一端适当的位置钉一个铁钉)、打点计时器及纸带、学生电源及导线(使用电火
花计时器不用学生电源)、5~6 条等长的橡皮筋、刻度尺.
[实验步骤]
1.按实验原理图中所示将实验仪器安装好.
2.平衡摩擦力:在长木板的有打点计时器的一端下面垫一块木板,反复移动木板的位置,直至小车上不
挂橡皮筋时,纸带打出的点间距均匀,即小车能匀速运动为止.
3.分别用 1 条、2 条、3 条……相同的橡皮筋做实验,实验中橡皮筋拉伸的长度都与第一次相同.这时橡
皮筋对小车做的功分别为 W、2W、3W……标记好每次实验得到的纸带.
[数据处理]
1.测量小车的速度
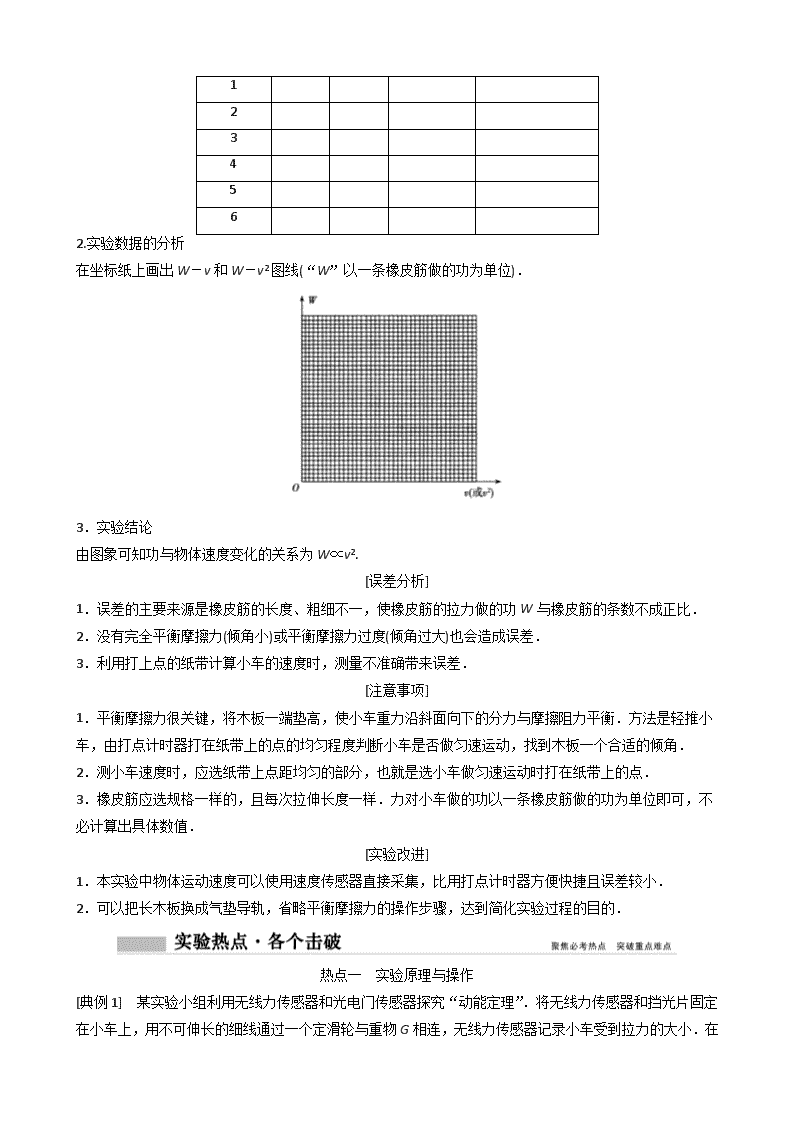
实验获得如图所示的纸带,为探究橡皮筋弹力做的功和小车速度的关系,需要测量弹力做功结束时小车的
速度,即小车做匀速运动的速度,测速度时,应选纸带上的点均匀的部分,应在纸带上测量的物理量是:
A1、A2 间的距离 x,小车速度的表达式是 v= x
4T(T 为打点计时器打点的时间间隔),把实验中得到的纸带分
别用同样的方法处理得到小车的速度,并计算速度的二次方,将实验数据记录在下列表格中.
橡皮筋
条数
位移
x/m
时间
t/s
速度
v/(m·s-1)
速度的二次方
v2/(m2·s-2)
1
2
3
4
5
6
2.实验数据的分析
在坐标纸上画出 W-v 和 W-v2 图线(“W”以一条橡皮筋做的功为单位).
3.实验结论
由图象可知功与物体速度变化的关系为 W∝v2.
[误差分析]
1.误差的主要来源是橡皮筋的长度、粗细不一,使橡皮筋的拉力做的功 W 与橡皮筋的条数不成正比.
2.没有完全平衡摩擦力(倾角小)或平衡摩擦力过度(倾角过大)也会造成误差.
3.利用打上点的纸带计算小车的速度时,测量不准确带来误差.
[注意事项]
1.平衡摩擦力很关键,将木板一端垫高,使小车重力沿斜面向下的分力与摩擦阻力平衡.方法是轻推小
车,由打点计时器打在纸带上的点的均匀程度判断小车是否做匀速运动,找到木板一个合适的倾角.
2.测小车速度时,应选纸带上点距均匀的部分,也就是选小车做匀速运动时打在纸带上的点.
3.橡皮筋应选规格一样的,且每次拉伸长度一样.力对小车做的功以一条橡皮筋做的功为单位即可,不
必计算出具体数值.
[实验改进]
1.本实验中物体运动速度可以使用速度传感器直接采集,比用打点计时器方便快捷且误差较小.
2.可以把长木板换成气垫导轨,省略平衡摩擦力的操作步骤,达到简化实验过程的目的.
热点一 实验原理与操作
[典例 1] 某实验小组利用无线力传感器和光电门传感器探究“动能定理”.将无线力传感器和挡光片固定
在小车上,用不可伸长的细线通过一个定滑轮与重物 G 相连,无线力传感器记录小车受到拉力的大小.在
水平轨道上 A、B 两点各固定一个光电门,用于记录挡光片经过光电门的挡光时间.在小车上放置砝码来
改变小车质量,用不同的重物 G 来改变拉力的大小.
(1)请将如下的实验主要步骤补充完整:
①测量小车和拉力传感器的总质量 M1.正确连接所需电路.适当调节导轨两端的旋钮,以改变导轨的倾斜
度,这样可以平衡小车的摩擦力.上述步骤完成后,将小车放置在导轨上,轻推小车,使之运动.可以通
过 判断小车是否做匀速运动.
②把细线的一端固定在力传感器上,另一端通过定滑轮与重物 G 相连;将小车停在点 C,由静止开始释放
小车,小车在细线拉动下运动,除了光电门测量速度和力传感器测量拉力的数据以外,还应该记录的物理
量为 ;
③改变小车的质量或重物的质量,重复②的操作.
次数 M/kg
|v22-v21|/
(m2·s-2)
ΔE/J F/N W/J
1 0.500 0.760 0.190 0.400 0.200
2 0.500 1.65 0.413 0.840 0.420
3 0.500 2.40 ΔE3 1.22 W3
(2)上表记录了试验中获取的数据,已经做了部分运算.表格中 M 是 M1 与小车中砝码质量之和,v1、v2 分
别是小车经过光电门 A、B 的瞬时速度,ΔE 为动能变化量,F 是拉力传感器的拉力,W 是 F 在 A、B 间所
做的功.表中的ΔE3= J,W3= J(结果均保留三位有效数字).
解析:(1)①小车做匀速运动,经过相同时间的位移相同.②两光电门间的距离.
(2)由动能公式ΔE3=1
2
M(v22-v21)得ΔE3=1
2
×0.500×2.40 J=0.600 J,根据表中数据由 W=FL 可求出两光电
门间距离 L=W
F
=0.5 m,所以 W3=F3×L=1.22×0.5 J=0.610 J.
答案:(1)①小车经过两光电门的时间是否相等 ②两光电门间的距离 (2)0.600 0.610
1.某同学把附有滑轮的长木板平放在实验桌上,将细绳一端拴在小车上,另一端绕过定滑轮,挂上适当
的钩码,使小车在钩码的牵引下运动,以此定量探究绳拉力做功与小车动能变化的关系.此外还准备了打
点计时器及配套的电源、导线、复写纸、纸带、小木块等.组装的实验装置如图所示.
(1)若要完成该实验,必需的实验器材还有 .
(2)实验开始时,他先调节木板上定滑轮的高度,使牵引小车的细绳与木板平行.他这样做的目的是 (填
字母代号).
A.避免小车在运动过程中发生抖动
B.可使打点计时器在纸带上打出的点迹清晰
C.可以保证小车最终能够实现匀速直线运动
D.可在平衡摩擦力后使细绳拉力等于小车受的合力
(3)平衡摩擦力后,当他用多个钩码牵引小车时,发现小车运动过快,致使打出的纸带上点数较少,难以选
到合适的点计算小车速度.在保证所挂钩码数目不变的条件下,请你利用本实验的器材提出一个解决办
法: .
(4)他将钩码重力做的功当作细绳拉力做的功,经多次实验发现拉力做功总是要比小车动能增量大一些.造
成这一情况可能是下列哪些原因造成的 (填字母代号).
A.在接通电源的同时释放了小车
B.小车释放时离打点计时器太近
C.阻力未完全被小车重力沿木板方向的分力平衡掉
D.钩码做匀加速运动,钩码重力大于细绳拉力
解析:(1)计算小车的动能变化时需用天平测质量;在计算小车通过的位移、小车的瞬时速度时都需用刻度
尺测距离.
(2)只有绳与板面平行时,才能保证小车运动中与板面间的压力不变,才能保证小车所受摩擦力不变,才能
保证平衡摩擦力后绳的拉力等于小车所受合力,故 D 正确.
(3)要增加纸带上所打下点的数目,只有减小小车运动的加速度.在所挂钩码数目不变的情况下只有增大小
车的质量,即在车上增加砝码或钩码.
(4)当将钩码重力作为小车所受合力时,需满足几个条件:一是摩擦力被平衡,二是绳与板面平行,此二者
可保证绳对车的拉力等于车所受合力,但车加速运动时钩码加速下降,钩码重力大于绳上拉力,则只有当
钩码质量远小于小车质量时二者才近似相等,故此情况可能是由 C、D 原因造成的.
答案:(1)刻度尺、天平(包括砝码) (2)D (3)可在小车上加适量的砝码(或钩码) (4)CD
热点二 数据处理与误差分析
[典例 2] (2019·临沂市十九中调研)在“探究功与物体速度变化的关系”的实验中,某实验探究小组的实
验装置如图中甲所示.木块从 A 点静止释放后,在 1 根弹簧作用下弹出,沿足够长的木板运动到 B1 点停下,
O 点为弹簧原长时所处的位置,测得 OB1 的距离为 L1,并记录此过程中弹簧对木块做的功为 W.用完全相同
的弹簧 2 根、3 根……并列在一起进行第 2 次、第 3 次……实验,每次实验木块均从 A 点释放,木块分别
运动到 B2、B3……停下,测得 OB2、OB3……的距离分别为 L2、L3……作出弹簧对木块做功 W 与木块停下
的位置距 O 点的距离 L 的 W-L 图象,如图乙所示.
(1)根据图线分析,弹簧对木块做功 W 与木块在 O 点的速度 v0 之间的关系 .
(2)W-L 图线为什么不通过原点? .
(3)弹簧被压缩的长度 LOA 为多少? .
解析:木块在平衡位置处获得最大速度,之后与弹簧分离,在摩擦力作用下运动到 B 位置停下,由 O 到 B
根据动能定理:-fL=0-1
2
mv20,故 L∝v20;对全过程应用动能定理有:W-fLOA-fL=0 即 W=fL+fLOA 结合
数学解析式判断图象中斜率为摩擦力大小、截距等于 OA 段摩擦力做的功.
(1)由动能定理知 L∝v20,由图线知 W 与 L 成线性变化,因此 W 与 v 20也应成线性关系,即 W∝v2.
(2)根据动能定理全过程的表达式 W-fLOA-fL=0,所以 W-L 图线不通过原点,是因为未计木块通过 AO
段时,摩擦力对木块所做的功.
(3)图中 W 轴上的斜率等于摩擦力大小,即 f=W
L
= 5-1
42-6
×102=100
9 N,截距等于摩擦力做的功,将 W=1
J,L=0.06 m 代入,得 1-fLOA-f×0.06=0,解得 LOA=0.03 m=3 cm.
答案:(1)W∝v2 (2)未计木块通过 AO 段时,摩擦力对木块所做的功 (3)3 cm
2.与打点计时器一样,光电计时器也是一种研究物体运动情况时常用的计时仪器,如图甲所示:a、b 分
别是光电门的激光发射器和接收装置.现利用如图乙所示的装置验证滑块所受外力做功与其动能变化的关
系.方法是:在滑块上安装一遮光板,把滑块放在水平放置的气垫导轨上(滑块在该导轨上运动时所受阻力
可忽略),通过跨过定滑轮的细绳与钩码相连,连接好 1、2 两个光电门,在图示位置释放滑块后,光电计
时器记录下滑块上的遮光板先后通过两个光电门的时间分别为Δt1、Δt2.已知滑块(含遮光板)质量为 M、钩
码质量为 m、两光电门间距为 s、遮光板宽度为 L、当地的重力加速度为 g.
(1)用游标卡尺(20 分度)测量遮光板宽度,刻度如图丙所示,读数为 m m.
(2)本实验想用钩码的重力表示滑块受到的合外力,为减小这种做法带来的误差,实验中需要满足的条件是
M m (填“远大于”“小于”或“远小于”).
(3)计算滑块先后通过两个光电门时的瞬时速度的表达式为:v1= 、v2= (用题中的字母表示).
(4)本实验中,验证滑块运动的动能定理的表达式为 (用题中所给字母表示).
解析:(1)游标卡尺的读数为 L=5 mm+0.05×14 mm=5.70 mm.
(2)对整体有 mg=(M+m)a,对滑块有 T=Ma,联立可得 T=Ma= Mmg
M+m
= mg
1+m
M
,只有当 M≫m 时,T≈mg.
(3)光电门的宽度很窄,所以通过光电门的平均速度可近似认为是瞬时速度,故有 v1= L
Δt1
,v2= L
Δt2
.
(4)重力做功为 mgs,动能变化量为 1
2
M( L
Δt2
)2-1
2
M( L
Δt1
)2,故只需要验证 1
2
M( L
Δt2
)2-1
2
M( L
Δt1
)2=mgs 即可.
答案:(1)5.70 mm (2)远大于 (3) L
Δt1
L
Δt2
(4)1
2
M( L
Δt2
)2-1
2
M( L
Δt1
)2=mgs
热点三 实验的改进与创新
1.实验器材及装置的改进
2.数据测量的改进
3.实验方案的改进
利用自由落体运动探究功和动能的关系.
4.实验目的的改进
应用动能定理测量接触面间的动摩擦因数
创新点一 实验装置的改进
[典例 3] 用如图甲所示装置来探究功和动能变化的关系.木板上固定两个完全相同的遮光条 A、B,用不
可伸长的细线将木板通过两个滑轮与弹簧测力计 C 相连,木板放在安装有定滑轮和光电门的轨道 D 上,轨
道放在水平桌面上,P 为小桶(内有沙子),滑轮质量、摩擦不计,重力加速度为 g.
(1)实验中轨道应倾斜一定角度,这样做目的是 .
A.为了使释放木板后,木板能匀加速下滑
B.为了增大木板下滑的加速度
C.可使得细线拉力做的功等于合力对木板做的功
D.可使得木板在未施加拉力时能匀速下滑
(2)用游标卡尺测量遮光条的宽度,如图乙所示,则遮光条的宽度 d= cm.
(3)实验主要步骤如下:
①测量木板、遮光条的总质量 M,测量两遮光条的距离 L,按甲图正确连接器材.
②将木板左端与轨道左端对齐,静止释放木板,木板在细线拉动下运动,记录弹簧测力计示数 F 及遮光条
B、A 先后经过光电门的时间为 t1、t2,则遮光条 B、A 通过光电门的过程中木板动能的变化量ΔEk= ,
合外力对木板做功 W= ,(用字母 M、t1、t2、d、L、F 表示).
③在小桶中增加沙子,重复②的操作.
④比较 W、ΔEk 的大小,得出实验结论.
(4)若在本实验中轨道水平放置,其他条件和实验步骤不变,假设木板与轨道之间的动摩擦因数为μ.测得多
组 F、t1、t2 的数据,并得到 F 与1
t22
-1
t21
的关系图象如图丙.已知图象在纵轴上的截距为 b,直线的斜率为 k,
求解μ= (用字母 b、d、L、k、g 表示).
解析:(1)木板略微倾斜的目的是平衡摩擦力(Mgsin θ=Ff),小车就能做匀速直线运动,小车连上细绳后拉
力等于其合力,细线的拉力对小车做的功等于合力对小车做的功,故 C、D 正确.
(2)游标卡尺的读数先读出主尺的刻度数:1 mm,游标尺的刻度第 14 个刻度与上边的刻度对齐,所以读数
为:0.05 mm×14=0.70 mm,总读数为:1 mm+0.70 mm=1.70 mm=0.170 cm.
(3)小车通过 B 时的速度 vB=d
t1
,小车通过 A 时的速度 vA=d
t2
,则ΔEk=1
2
Mv2A-1
2
Mv2B=Md2
2
(1
t22
-1
t21
).光滑的
滑轮两端的细绳拉力处处相同,弹簧测力计的示数显示的是细绳的拉力 F 即为小车的合外力,故 W=FL.
(4)当轨道水平放置时,对小车由动能定得(F-μMg)L=Md2
2 (1
t22
-1
t21
),解得 F=Md2
2L (1
t22
-1
t21
)+μMg,结合 F 与
1
t22
-1
t21
的关系图象可知斜率Md2
2L
=k,纵截距 b=μMg,联立解得μ= b
Mg
= bd2
2kgL.
答案:(1)CD (2)0.170 (3)Md2
2
(1
t22
-1
t21
) FL (4) bd2
2kgL
创新点二 实验目的的改进——测动摩擦因数
[典例 4] 某同学利用如图所示装置测量小木块与接触面间的滑动摩擦因数,已知小木块与斜面和水平面的
滑动摩擦因数相同,小木块由斜面上的 A 点静止下滑,
经过 B 点到达水平面上的 C 点静止,A、C 两点间的水平距离为 x,小木块可视为质点,回答下列问题:
(1)小木块质量为 m,重力加速度大小为 g,若滑动摩擦因数为μ,由 A 点运动到 C 点过程中,克服摩擦力
做功与 x 之间的关系式为 Wf= .
(2)为尽量简便的测量小木块与接触面间的滑动摩擦因数,下列哪些物理量需要测量 .
A.小木块的质量 m B.斜面倾角θ
C.A、B 两点间的距离 D.A、C 两点间的竖直高度差 h
E.A、C 两点间的水平距离 x
(3)利用上述测量的物理量,写出测量的滑动摩擦因数μ= ;
(4)小木块运动到 B 点时,由于与水平面的作用,竖直方向的分速度将损失,将导致测量的滑动摩擦因数与
实际滑动摩擦因数相比,其值将 (填“偏大”“相等”或“偏小”).
解析:(1)设 A 点的高度为 h,小木块从 A 点运动到 C 点的过程中,克服摩擦力做功为:Wf=μmgcos θ· h
sin θ
+μmg(x- h
tan θ)=μmgx.
(2)(3)小木块从 A 点运动 C 点过程,根据动能定理有 mgh-μmgx=0,解得μ=h
x
,故需要测量 h 和 x,D、
E 正确.
(4)由于小木块经过 B 点损失动能,将导致 x 的测量值比理想值小,因而测量所得的滑动摩擦因数将比实际
数值大.
答案:(1)μmgx (2)DE (3)h
x (4)偏大
1.某学习小组用图甲所示的实验装置探究“动能定理”.他们在气垫导轨上安装了一个光电门 B,滑块上
固定一遮光条,滑块用细线绕过气垫导轨左端的定滑轮与力传感器相连,传感器下方悬挂钩码,每次滑块
都从 A 处由静止释放.
(1)某同学用游标卡尺测量遮光条的宽度 d,如图乙所示,则 d= m m.
(2)下列实验要求中不必要的一项是 (请填写选项前对应的字母).
A.应使滑块质量远大于钩码和力传感器的总质量
B.应使 A 位置与光电门间的距离适当大些
C.应将气垫导轨调至水平
D.应使细线与气垫导轨平行
(3)实验时保持滑块的质量 M 和 A、B 间的距离 L 不变,改变钩码质量 m,测出对应的力传感器的示数 F 和
遮光条通过光电门的时间 t,通过描点作出线性图象,研究滑块动能变化与合外力对它所做功的关系,处
理数据时应作出的图象是 (请填写选项前对应的字母).
A.作出“t-F 图象” B.作出“t2-F 图象”
C.作出“t2-1
F
图象” D.作出“1
t
-F2 图象”
解析:(1)由图知第 5 条刻度线与主尺对齐,则 d=2 mm+5×0.05 mm=2.25 mm;
(2)拉力是直接通过传感器测量的,故与小车质量和钩码质量大小无关,故 A 不必要;应使 A 位置与光电门
间的距离适当大些,有利于减小误差,故 B 是必要的;应将气垫导轨调节水平,保持拉线方向与木板平面
平行,这样拉力才等于合力,故 C、D 是必要的;本题选不必要的,故选 A.
(3)根据牛顿第二定律得 a= F
M
,那么(d
t)2=2( F
M)L 解得:t2=Md2
2LF .所以研究滑块的加速度与力的关系,处理
数据时应作出1
t2
-F 图象或作出 t2-1
F
图象,故 C 正确.
答案:(1)2.25 (2)A (3)C
2.(2019·哈尔滨六中月考)某同学利用如图甲所示的装置验证动能定理.固定并调整斜槽,使它的末端 O
点的切线水平,在水平地面上依次铺放好木板、白纸、复写纸.将小球从不同的标记点由静止释放,记录
小球到达斜槽底端时下落的高度 H,并根据落点位置测量出小球平抛的水平位移 x.改变小球在斜槽上的释
放位置,进行多次测量,记录数据如下:
高度 H(h 为单位长
度)
h 2h 3h 4h 5h 6h 7h 8h 9h
水平位移 x/cm 5.5 9.1 11.7 14.2 15.9 17.6 19.0 20.6 21.7
(1)已知斜槽倾角为θ,小球与斜槽之间的动摩擦因数为μ,斜槽底端离地的高度为 y,不计小球与水平槽
之间的摩擦,小球从斜槽上滑下的过程中,动能定理若成立应满足的关系式是 ;
(2)以 H 为横坐标,以 为纵坐标,在坐标纸上描点作图,如图乙所示;
(3)由第(1)、(2)问,可以得出结论 ;
(4)受该实验方案的启发,某同学改用图丙的装置实验.他将木板竖直放置在斜槽末端的前方某一位置固定,
仍将小球从不同的标记点由静止释放,记录小球到达斜槽底端时下落的高度 H,并测量小球击中木板时平
抛下落的高度 d,他以 H 为横坐标,以 为纵坐标,描点作图,使之仍为一条倾斜的直线,也达到了同
样的目的.
解析:(1)设小球离开斜槽时的速度为 v,根据平抛运动的规律得:x=vt,y=1
2
gt2,联立得:v=x g
2y
,
小球在斜槽上滑下过程中,重力和摩擦力做功,则合力做的功为:W=mgH-μmgcos θ· H
sinθ
=
mgH
1- μ
tan θ ,小球动能的变化量ΔEk=1
2
mv2=1
2
m
x g
2y 2=mgx2
4y
,则小球从斜槽上滑下的过程中,动
能定理若成立应满足的关系式是 mgH
1- μ
tan θ =mgx2
4y
,化简得:H
1- μ
tan θ =x2
4y
;(2)根据上题结果可
知,以 H 为横坐标,以 x2 为纵坐标,在坐标纸上描点作图,如图乙所示;
(3)由第(1)、(2)问,结合图象可得:在实验误差允许的范围内,小球运动到斜槽底端的过程中,合外力对小
球所做的功等于小球动能的增量;
(4)根据平抛运动的规律有:v=x
t
=
x
2d
g
=x g
2d
,则动能定理表达式为:mgH
1- μ
tanθ =1
2
mv2=mgx2
4d
,
化简得:H
1- μ
tan θ =x2
4
×1
d
,故以 H 为横坐标,以1
d
为纵坐标,描点作图,使之仍为一条倾斜的直线.
答案:(1)
1- μ
tan θ Η=x2
4y (2)x2 (3)在实验误差允许的范围内,小球运动到斜槽低端的过程中合外力
对小球所做的功等于小球动能的增量 (4)1
d
3.(2019·临沂十九中调研)如图甲所示,用质量为 m 的重物通过滑轮牵引小车,使它在长木板上运动,
打点计时器在纸带上记录小车的运动情况.利用该装置可以完成“探究动能定理”的实验.
(1)实验中,需要平衡摩擦力和其他阻力.正确操作方法是 (选填选项前的字母).
A.把长木板右端垫高
B.改变小车的质量
在不挂重物且 (选填选项前的字母)的情况下,轻推一下小车,若小车拖着纸带做匀速运动,表明已经
消除了摩擦力和其他阻力的影响.
A.计时器不打点
B.计时器打点
(2)接通电源,释放小车,打点计时器在纸带上打下一系列点,将打下的第一个点标为 O.在纸带上依次取 A、
B、C……若干个计数点,已知相邻计数点间的时间间隔为 T.测得 A、B、C……各点到 O 点的距离为 x1、x2、
x3……如图乙所示.
实验中,重物质量远小于小车质量,可认为小车所受的拉力大小为 mg,从打 O 点到打 B 点的过程中,拉
力对小车做的功 W= ,打 B 点时小车的速度 v= .
(3)假设已经完全消除了摩擦力和其他阻力的影响,若重物质量不满足远小于小车质量的条件,则从理论上
分析,图丙中正确反映 v2-W 关系的是 .
解析:(1)平衡摩擦力的方法是:把木板一段垫高,让小车滑下,当小车匀速运动时,就意味着摩擦力抵消
了,故选 A;平衡摩擦力时,应当让打点计时器打点,因为打点计时器也会有摩擦力,故选 B;
(2)由于近似认为拉力等于重力,所以拉力做功为 W=mgx2;中间时刻的速度等于该段时间内的平均速度,
所以 B 点的速度等于 AC 段的平均速度,即 v=x3-x1
2T
;
(3)如果实验中完全消除了摩擦力和其他阻力,那么重物重力做的功就等于重物和小车动能的增加量;即:
W=1
2
(M+m)v2,质量都是定值,所以 v2 与 W 成正比,故选 A.
答案:(1)A B (2)mgx2
x3-x1
2T (3)A
相关文档
- 高考第一轮复习物理七考纲解读及真2021-05-22 13:38:176页
- 高考一轮复习物理选修35专题练习动2021-05-10 21:37:1117页
- 高考第一轮复习物理22匀速直线运动2021-04-28 19:09:4212页
- 高三一轮复习物理第5章《机械能及2021-04-27 18:19:156页
- 高三一轮复习物理第9章《电磁感应2021-04-27 11:24:587页
- 高考一轮复习物理单元检测九 电磁2021-04-26 01:20:227页
- 高三一轮复习物理第9章《电磁感应2021-04-19 22:06:5311页
- 高三一轮复习物理第3章《牛顿运动2021-04-19 20:02:534页
- 高三一轮复习物理第2章《相互作用2021-04-19 18:03:473页
- 高三一轮复习物理第4章《曲线运动2021-04-17 11:37:4312页