

- 60.76 KB
- 2021-05-20 发布
EPSON 安全防护指导
1、硬件防护
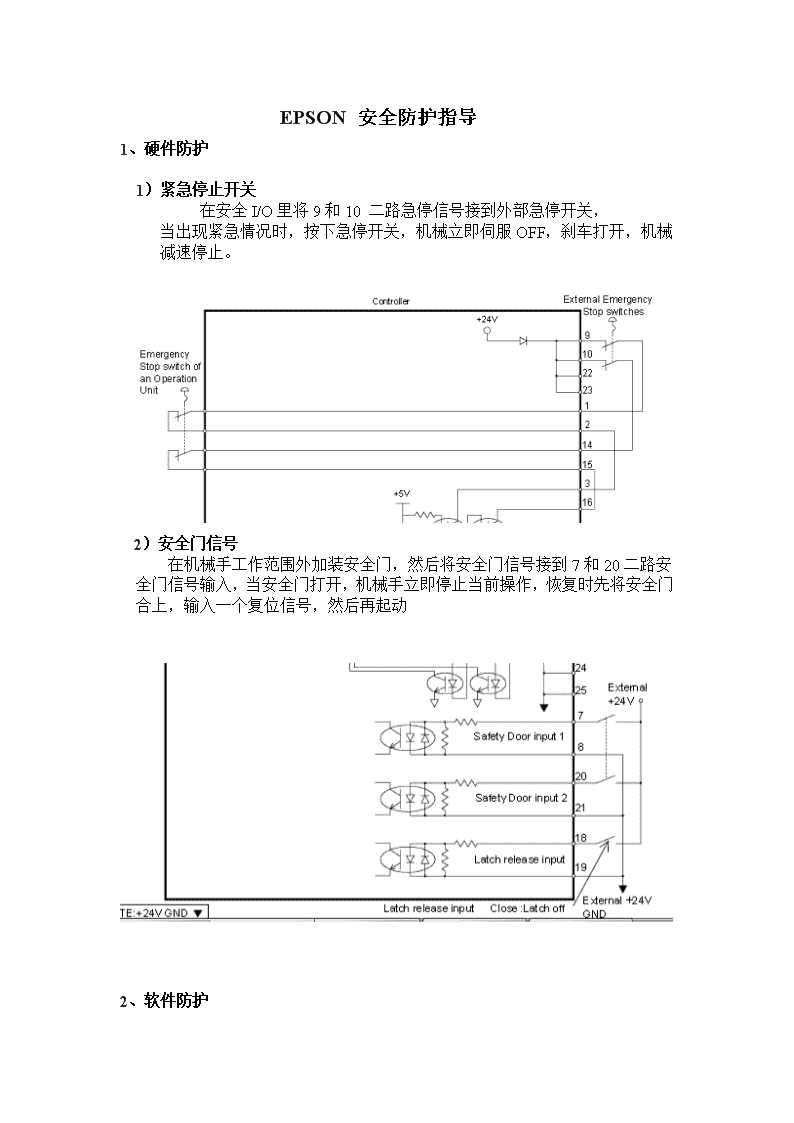
1)紧急停止开关
在安全 I/O 里将 9 和 10 二路急停信号接到外部急停开关,
当出现紧急情况时,按下急停开关,机械立即伺服 OFF,刹车打开,机械
减速停止。
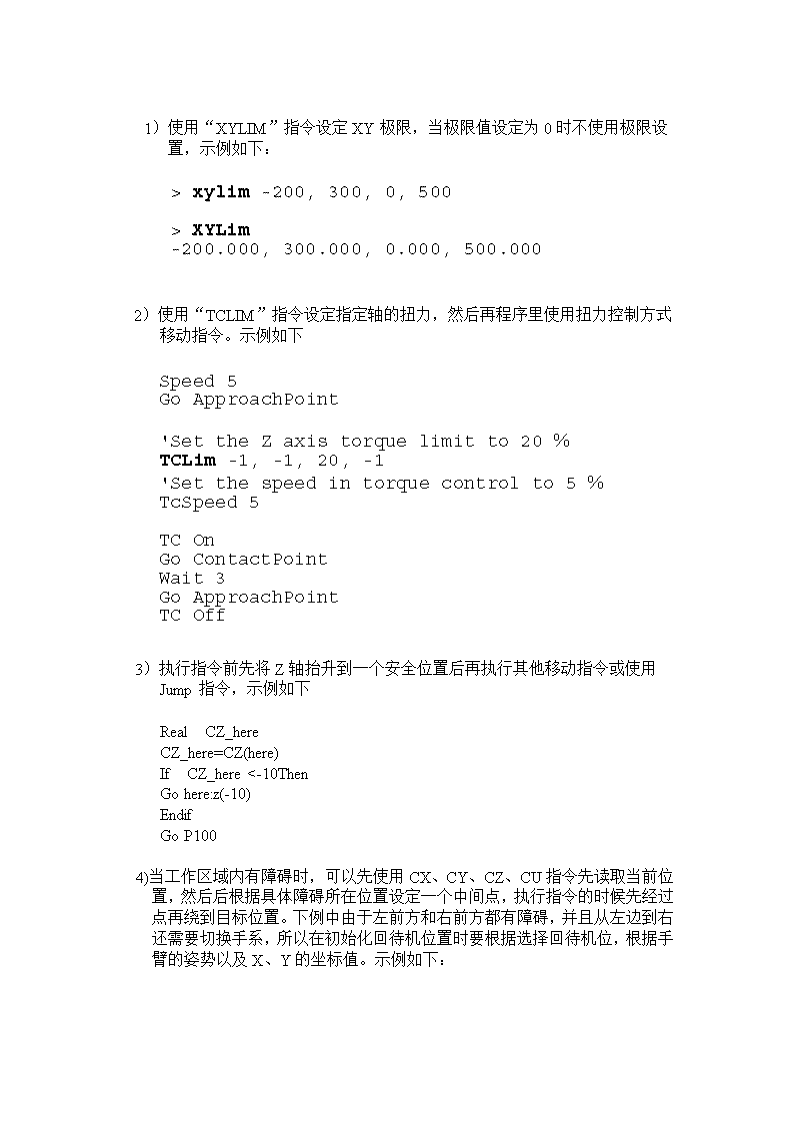
2)安全门信号
在机械手工作范围外加装安全门,然后将安全门信号接到 7 和 20 二路安
全门信号输入,当安全门打开,机械手立即停止当前操作,恢复时先将安全门
合上,输入一个复位信号,然后再起动
2、软件防护
1)使用“XYLIM”指令设定 XY 极限,当极限值设定为 0 时不使用极限设
置,示例如下:
2)使用“TCLIM”指令设定指定轴的扭力,然后再程序里使用扭力控制方式
移动指令。示例如下
3)执行指令前先将 Z 轴抬升到一个安全位置后再执行其他移动指令或使用
Jump 指令,示例如下
Real CZ_here
CZ_here=CZ(here)
If CZ_here <-10Then
Go here:z(-10)
Endif
Go P100
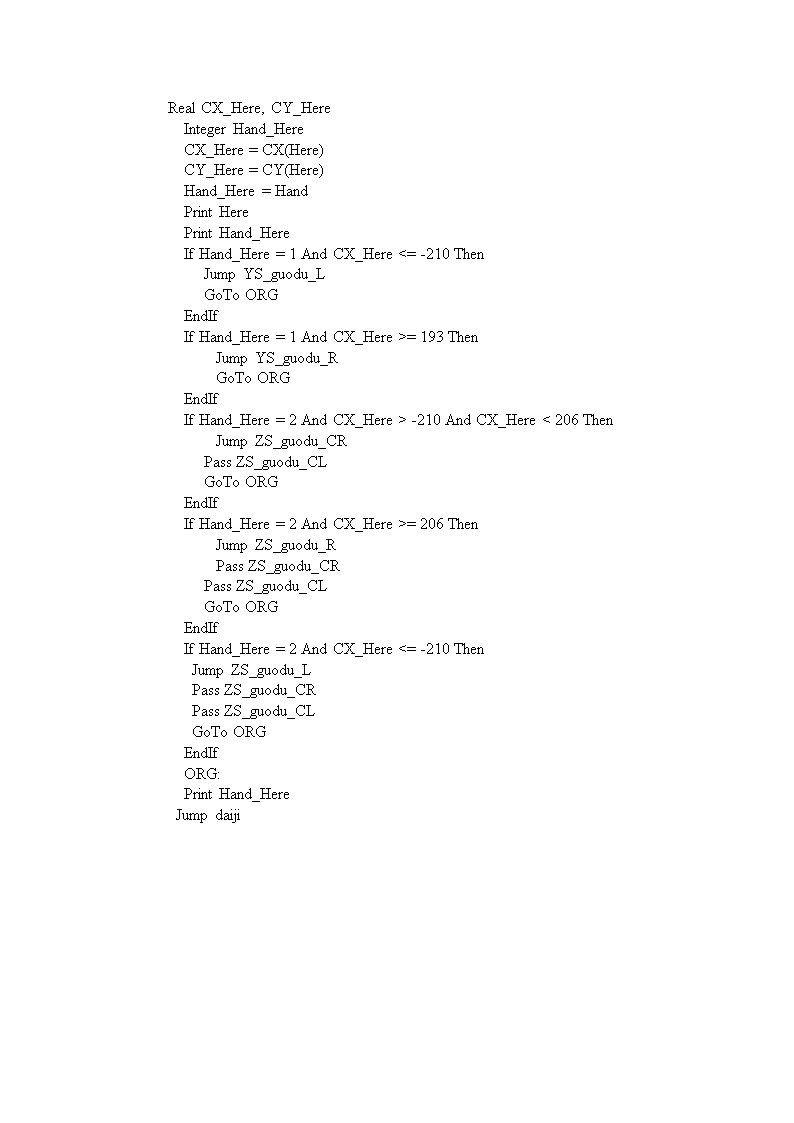
4)当工作区域内有障碍时,可以先使用 CX、CY、CZ、CU 指令先读取当前位
置,然后后根据具体障碍所在位置设定一个中间点,执行指令的时候先经过
点再绕到目标位置。下例中由于左前方和右前方都有障碍,并且从左边到右
还需要切换手系,所以在初始化回待机位置时要根据选择回待机位,根据手
臂的姿势以及 X、Y 的坐标值。示例如下:
Real CX_Here, CY_Here
Integer Hand_Here
CX_Here = CX(Here)
CY_Here = CY(Here)
Hand_Here = Hand
Print Here
Print Hand_Here
If Hand_Here = 1 And CX_Here <= -210 Then
Jump YS_guodu_L
GoTo ORG
EndIf
If Hand_Here = 1 And CX_Here >= 193 Then
Jump YS_guodu_R
GoTo ORG
EndIf
If Hand_Here = 2 And CX_Here > -210 And CX_Here < 206 Then
Jump ZS_guodu_CR
Pass ZS_guodu_CL
GoTo ORG
EndIf
If Hand_Here = 2 And CX_Here >= 206 Then
Jump ZS_guodu_R
Pass ZS_guodu_CR
Pass ZS_guodu_CL
GoTo ORG
EndIf
If Hand_Here = 2 And CX_Here <= -210 Then
Jump ZS_guodu_L
Pass ZS_guodu_CR
Pass ZS_guodu_CL
GoTo ORG
EndIf
ORG:
Print Hand_Here
Jump daiji
5)通过“ERR”指令获取报警代码,示例如下
相关文档
- 技能培训专题-企业培训师三级考试2021-05-20 01:44:424页
- 技能培训专题-合格焊工登记表2021-05-20 00:04:082页
- 技能培训专题 焊工上岗证 复习题库2021-05-19 12:08:149页
- 技能培训专题 叉车司机理论题库 第2021-05-13 00:56:2212页
- 技能培训专题 单选题-建筑安全管理2021-05-12 12:55:162页
- 技能培训专题 CM01-02合同需求单(II2021-05-12 01:59:085页
- 技能培训专题 叉车司机理论题库 第2021-05-11 22:41:4213页
- 技能培训专题-新型无网保温施工工2021-05-11 22:09:174页
- 技能培训专题 国际标准焊接符号2021-05-11 21:55:076页
- 技能培训专题 电气施工管理口诀2021-05-11 19:26:239页