

- 11.49 MB
- 2021-05-19 发布
第 42 课 力学实验
1.对原型实验的考查
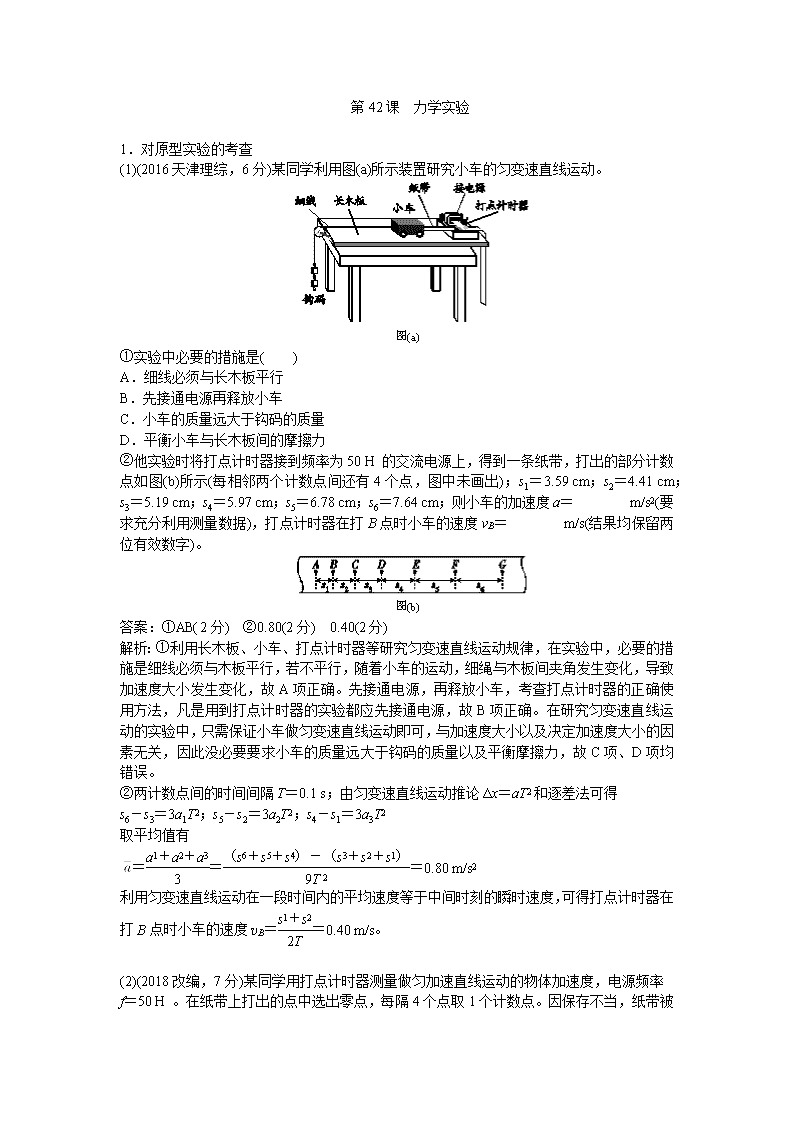
(1)(2016 天津理综,6 分)某同学利用图(a)所示装置研究小车的匀变速直线运动。
图(a)
①实验中必要的措施是( )
A.细线必须与长木板平行
B.先接通电源再释放小车
C.小车的质量远大于钩码的质量
D.平衡小车与长木板间的摩擦力
②他实验时将打点计时器接到频率为 50 H 的交流电源上,得到一条纸带,打出的部分计数
点如图(b)所示(每相邻两个计数点间还有 4 个点,图中未画出);s1=3.59 cm;s2=4.41 cm;
s3=5.19 cm;s4=5.97 cm;s5=6.78 cm;s6=7.64 cm;则小车的加速度 a= m/s2(要
求充分利用测量数据),打点计时器在打 B 点时小车的速度 vB= m/s(结果均保留两
位有效数字)。
图(b)
答案:①AB(2 分) ②0.80(2 分) 0.40(2 分)
解析:①利用长木板、小车、打点计时器等研究匀变速直线运动规律,在实验中,必要的措
施是细线必须与木板平行,若不平行,随着小车的运动,细绳与木板间夹角发生变化,导致
加速度大小发生变化,故 A 项正确。先接通电源,再释放小车,考查打点计时器的正确使
用方法,凡是用到打点计时器的实验都应先接通电源,故 B 项正确。在研究匀变速直线运
动的实验中,只需保证小车做匀变速直线运动即可,与加速度大小以及决定加速度大小的因
素无关,因此没必要要求小车的质量远大于钩码的质量以及平衡摩擦力,故 C 项、D 项均
错误。
②两计数点间的时间间隔 T=0.1 s;由匀变速直线运动推论Δx=aT2 和逐差法可得
s6-s3=3a1T2;s5-s2=3a2T2;s4-s1=3a3T2
取平均值有
=a1+a2+a3
3
=(s6+s5+s4)-(s3+s2+s1)
9T 2
=0.80 m/s2
利用匀变速直线运动在一段时间内的平均速度等于中间时刻的瞬时速度,可得打点计时器在
打 B 点时小车的速度 vB=s1+s2
2T
=0.40 m/s。
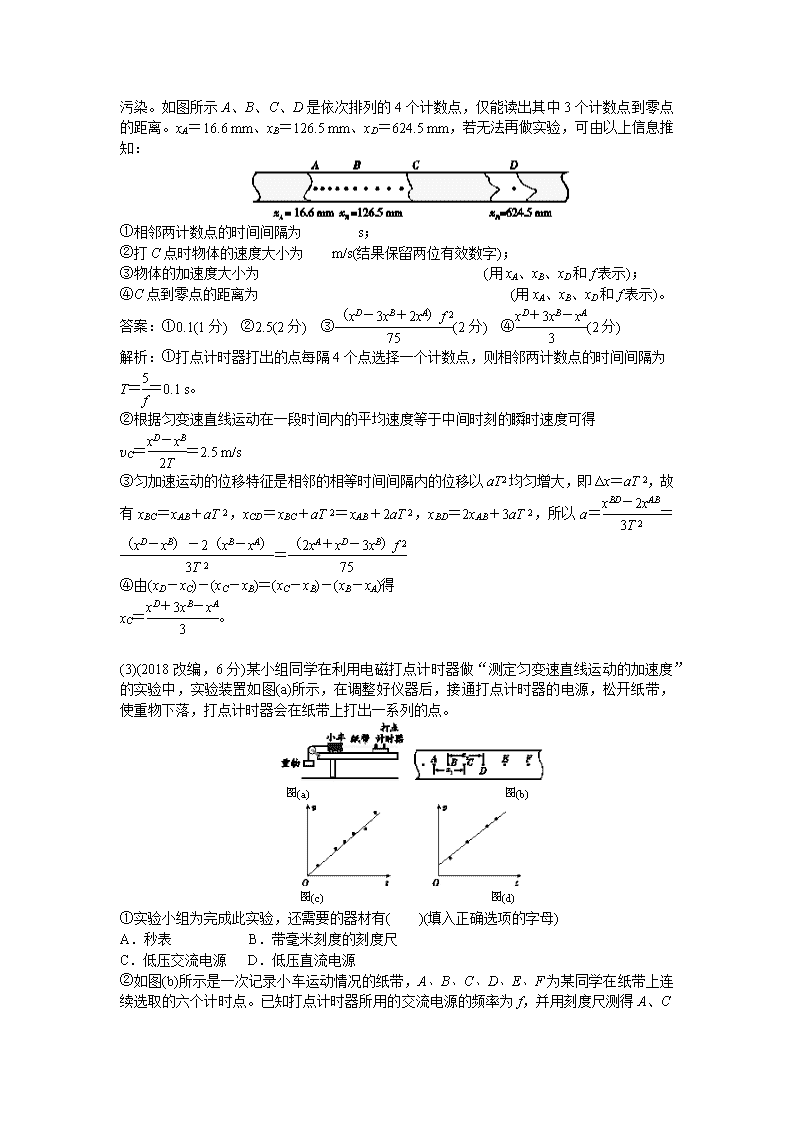
(2)(2018 改编,7 分)某同学用打点计时器测量做匀加速直线运动的物体加速度,电源频率
f=50 H 。在纸带上打出的点中选出零点,每隔 4 个点取 1 个计数点。因保存不当,纸带被
污染。如图所示 A、B、C、D 是依次排列的 4 个计数点,仅能读出其中 3 个计数点到零点
的距离。xA=16.6 mm、xB=126.5 mm、xD=624.5 mm,若无法再做实验,可由以上信息推
知:
①相邻两计数点的时间间隔为 s;
②打 C 点时物体的速度大小为 m/s(结果保留两位有效数字);
③物体的加速度大小为 (用 xA、xB、xD 和 f 表示);
④C 点到零点的距离为 (用 xA、xB、xD 和 f 表示)。
答案:①0.1(1 分) ②2.5(2 分) ③(xD-3xB+2xA)f 2
75
(2 分) ④xD+3xB-xA
3
(2 分)
解析:①打点计时器打出的点每隔 4 个点选择一个计数点,则相邻两计数点的时间间隔为
T=5
f
=0.1 s。
②根据匀变速直线运动在一段时间内的平均速度等于中间时刻的瞬时速度可得
vC=xD-xB
2T
=2.5 m/s
③匀加速运动的位移特征是相邻的相等时间间隔内的位移以 aT2 均匀增大,即Δx=aT 2,故
有 xBC=xAB+aT 2,xCD=xBC+aT 2=xAB+2aT 2,xBD=2xAB+3aT 2,所以 a=xBD-2xAB
3T 2
=
(xD-xB)-2(xB-xA)
3T 2
=(2xA+xD-3xB)f 2
75
④由(xD-xC)-(xC-xB)=(xC-xB)-(xB-xA)得
xC=xD+3xB-xA
3
。
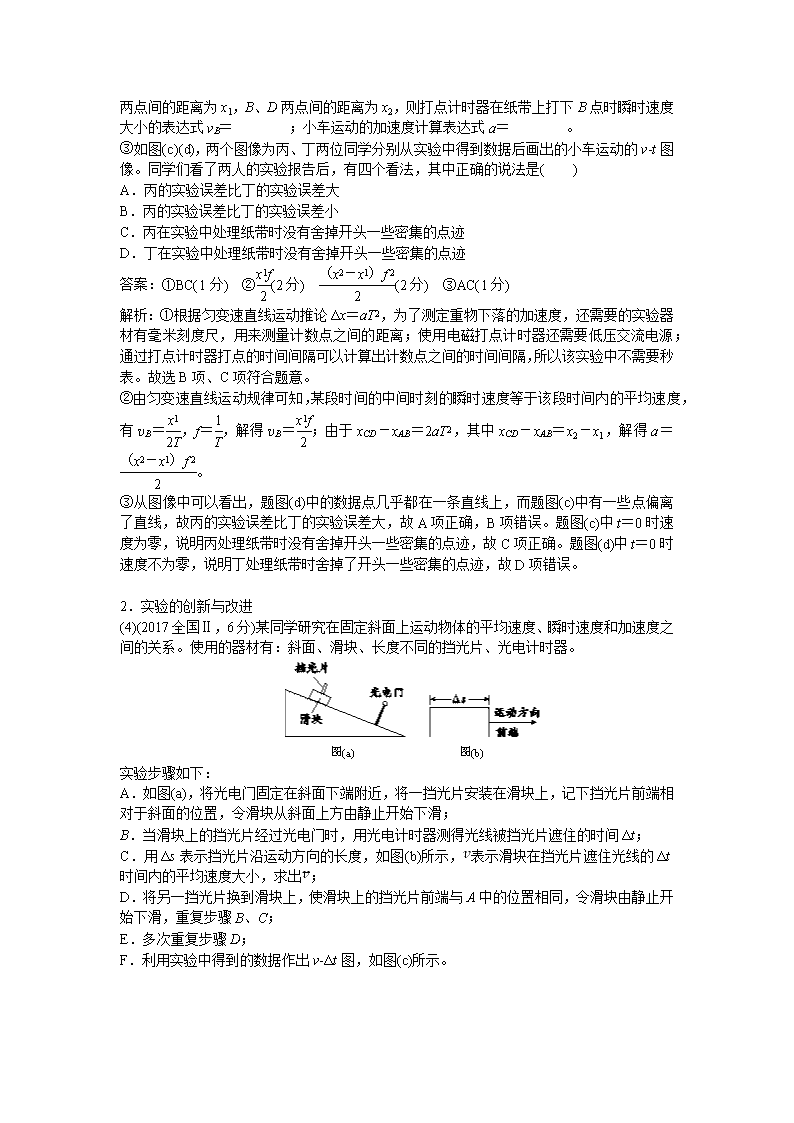
(3)(2018 改编,6 分)某小组同学在利用电磁打点计时器做“测定匀变速直线运动的加速度”
的实验中,实验装置如图(a)所示,在调整好仪器后,接通打点计时器的电源,松开纸带,
使重物下落,打点计时器会在纸带上打出一系列的点。
图(a) 图(b)
图(c) 图(d)
①实验小组为完成此实验,还需要的器材有( )(填入正确选项的字母)
A.秒表 B.带毫米刻度的刻度尺
C.低压交流电源 D.低压直流电源
②如图(b)所示是一次记录小车运动情况的纸带,A、B、C、D、E、F 为某同学在纸带上连
续选取的六个计时点。已知打点计时器所用的交流电源的频率为 f,并用刻度尺测得 A、C
两点间的距离为 x1,B、D 两点间的距离为 x2,则打点计时器在纸带上打下 B 点时瞬时速度
大小的表达式 vB= ;小车运动的加速度计算表达式 a= 。
③如图(c)(d),两个图像为丙、丁两位同学分别从实验中得到数据后画出的小车运动的 v-t
图像。同学们看了两人的实验报告后,有四个看法,其中正确的说法是( )
A.丙的实验误差比丁的实验误差大
B.丙的实验误差比丁的实验误差小
C.丙在实验中处理纸带时没有舍掉开头一些密集的点迹
D.丁在实验中处理纸带时没有舍掉开头一些密集的点迹
答案:①BC(1 分) ②x1f
2 (2 分) (x2-x1)f 2
2
(2 分) ③AC(1 分)
解析:①根据匀变速直线运动推论Δx=aT2,为了测定重物下落的加速度,还需要的实验器
材有毫米刻度尺,用来测量计数点之间的距离;使用电磁打点计时器还需要低压交流电源;
通过打点计时器打点的时间间隔可以计算出计数点之间的时间间隔,所以该实验中不需要秒
表。故选 B 项、C 项符合题意。
②由匀变速直线运动规律可知,某段时间的中间时刻的瞬时速度等于该段时间内的平均速度,
有 vB= x1
2T
,f=1
T
,解得 vB=x1f
2
;由于 xCD-xAB=2aT2,其中 xCD-xAB=x2-x1,解得 a=
(x2-x1)f 2
2
。
③从图像中可以看出,题图(d)中的数据点几乎都在一条直线上,而题图(c)中有一些点偏离
了直线,故丙的实验误差比丁的实验误差大,故 A 项正确,B 项错误。题图(c)中 t=0 时速
度为零,说明丙处理纸带时没有舍掉开头一些密集的点迹,故 C 项正确。题图(d)中 t=0 时
速度不为零,说明丁处理纸带时舍掉了开头一些密集的点迹,故 D 项错误。
2.实验的创新与改进
(4)(2017 全国Ⅱ,6 分)某同学研究在固定斜面上运动物体的平均速度、瞬时速度和加速度之
间的关系。使用的器材有:斜面、滑块、长度不同的挡光片、光电计时器。
图(a) 图(b)
实验步骤如下:
A.如图(a),将光电门固定在斜面下端附近,将一挡光片安装在滑块上,记下挡光片前端相
对于斜面的位置,令滑块从斜面上方由静止开始下滑;
B.当滑块上的挡光片经过光电门时,用光电计时器测得光线被挡光片遮住的时间Δt;
C.用Δs 表示挡光片沿运动方向的长度,如图(b)所示,
��
表示滑块在挡光片遮住光线的Δt
时间内的平均速度大小,求出
��
;
D.将另一挡光片换到滑块上,使滑块上的挡光片前端与 A 中的位置相同,令滑块由静止开
始下滑,重复步骤 B、C;
E.多次重复步骤 D;
F.利用实验中得到的数据作出 v-Δt 图,如图(c)所示。
图(c)
完成下列填空:
①用 a 表示滑块下滑的加速度大小,用 vA 表示挡光片前端到达光电门时滑块的瞬时速度大
小,则
��
与 vA、a 和Δt 的关系式为
��
= ;
②由图(c)可求得 vA= cm/s,a= cm/s2(结果保留 3 位有效数字)。
答案:①vA+1
2aΔt(2 分) ②52.1(2 分) 16.3(15.8 16.8 均正确)(2 分)
解析:①匀变速直线运动中,一段时间内的平均速度等于中间时刻的瞬时速度,则
��
等于挡
光片通过光电门过程中中间时刻的瞬时速度,根据速度时间公式得
��
=vA+1
2aΔt。
②由
��
=vA+1
2aΔt 知,图线纵轴截距等于 vA,图线的斜率 k=1
2a,由题图(c)可知
vA=52.1 cm/s
a=2k=2×53.52-52.30
0.15
cm/s2=16.3 cm/s2。
(5)(2017 全国Ⅰ,5 分)某探究小组为了研究小车在桌面上的直线运动,用自制“滴水计时器”
计量时间。实验前,将该计时器固定在小车旁,如图(a)所示。实验时,保持桌面水平,用
手轻推一下小车。在小车运动过程中,滴水计时器等时间间隔地滴下小水滴,图(b)记录了
桌面上连续的 6 个水滴的位置。(已知滴水计时器每 30 s 内共滴下 46 个小水滴)
图(a)
图(b)
①由图(b)可知,小车在桌面上是 (选填“从右向左”或“从左向右”)运动的。
②该小组同学根据图(b)的数据判断出小车做匀变速运动。小车运动到图(b)中 A 点位置时的
速度大小为 m/s,加速度大小为 m/s2(结果均保留 2 位有效数字)。
答案:①从右向左(1 分) ②0.19(2 分) 0.037(2 分)
解析:①小车在阻力的作用下做匀减速直线运动,由题图(b)知,从右向左相邻水滴间的距
离逐渐减小,所以小车在桌面上是从右向左运动的。
②已知滴水计时器每 30 s 内共滴下 46 个小水滴,所以相邻两水滴间的时间间隔为Δt=
t
n-1
=2
3 s,设从左到右各段位移依次为 x1、x2、x3、x4、x5,则 A 点位置的速度 vA=x3+x4
2Δt
=
0.19 m/s;由Δx=aT2、Δt=2
3 s 和逐差法可得 a=(x5+x4)-(x3+x2)
4(Δt)2
=0.037 m/s2。
(6)(经典题,6 分)为了测量木块与木板间动摩擦因数μ,某小组使用位移传感器设计了如图(a)
所示实验装置,让木块从倾斜木板上一点 A 由静止释放,位移传感器可以测出木块到传感
器的距离。位移传感器连接计算机,描绘出木块相对传感器的位移 x 随时间 t 变化规律,如
图(b)所示。
图(a) 图(b)
①根据上述图线,计算 0.4 s 时木块的速度 v= m/s,木块的加速度 a= m/s2;
②为了测定动摩擦因数μ,还需要测量的量是 (已知当地的重力加速度 g);
③为了提高木块与木板间动摩擦因数μ的测量精度,下列措施可行的是( )
A.A 点与传感器距离适当大些
B.木板的倾角越大越好
C.选择体积较大的空心木块
D.传感器开始计时的时刻必须是木块从 A 点释放的时刻
答案:①0.4(1 分) 1(1 分) ②斜面倾角(或 A 点的高度)(2 分) ③A(2 分)
解析:①根据匀变速直线运动中,某段时间内的平均速度等于这段时间内中间时刻的瞬时速
度,结合 x-t 图像可知,0.4 s 末的速度为 v=Δx
2T
=0.3-0.14
0.4
m/s=0.4 m/s
0.2 s 末的速度为 v′=Δx′
2T
=0.32-0.24
0.4
m/s=0.2 m/s
故木块的加速度为 a=Δv
Δt
=1 m/s2
②选取木块为研究对象,根据牛顿第二定律有 ma=mgsin θ-μmgcos θ
得μ=gsin θ-a
gcos θ
所以要测定动摩擦因数,还需要测出斜面的倾角θ。
③根据②中分析可知,在实验中,为了减小实验误差,应使木块的运动时间长一些,可以减
小斜面的倾角、增加木块在斜面上滑行的位移等,传感器开始的计时时刻不一定必须是木块
从 A 点释放的时刻,故 A 项正确。
3.教材原型实验
(7)(2018 改编,6 分)某实验小组用如图(a)所示装置,探究在弹性限度内弹簧弹力与弹簧伸长
量的关系。
图(a) 图(b)
①他们设计了如下的操作步骤,请你将以下操作步骤按实际操作的先后顺序排列出来,并填
在横线上 。
A.以弹簧伸长量为横坐标,以弹力为纵坐标,描出各组数据(x,F)对应的点,并用平
滑的曲线将这些点连接起来
B.记下弹簧下端不挂钩码时,其下端指针所指刻度尺上的刻度 L
C.将铁架台固定在桌子上(也可在横梁的另一端挂上一定的配重),并将弹簧的一端系
于横梁上,在弹簧附近竖直固定一刻度尺
D.依次在弹簧下端挂上 1 个、2 个、3 个、4 个……钩码,分别记下钩码静止时弹簧下
端指针所指刻度尺的刻度,并记录在表格内,然后取下钩码
E.以弹簧伸长量为自变量,写出弹力与伸长量的关系式,首先尝试写成一次函数,不
行再写成二次函数
F.解释函数表达式中常数的物理意义
G.整理仪器
②从图(b)可求得该弹簧的劲度系数为 N/m(g=9.8 m/s2),图像不过原点的原因
是 。
③关于实验中的实验要点及实验结果,以下说法正确的是 。
A.弹簧被拉伸时,不能超出它的弹性限度
B.用悬挂钩码的方法给弹簧施加拉力,应保证弹簧位于竖直位置且处于平衡状态
C.用直尺测得弹簧的长度即为弹簧的伸长量
D.用几个不同的弹簧,分别测出几组拉力与伸长量,得出拉力与伸长量之比相等
答案:①CBDAEFG(2 分) ②200(1 分) 弹簧自重(1 分) ③AB(2 分)
解析:①整个实验操作的步骤应按如下顺序,安装设备,C;进行实验,BD;数据处理,
AEF;整理仪器,G;因此实际操作步骤应为 CBDAEFG。
②图像中斜率表示劲度系数,则 k= 7
(4-0.5)×10-2 N/m=200 N/m,图像不过原点说明
没有力时有了形变量,故说明弹簧有自身重力的存在。
③弹簧被拉伸时,不能超出它的弹性限度,否则弹簧会损坏,故 A 项正确。用悬挂钩码的
方法给弹簧施加拉力,要保证弹簧位于竖直位置,使钩码的重力等于弹簧的弹力,要待钩码
平衡时再读读数,故 B 项正确。弹簧的伸长量等于弹簧拉伸后的长度减去弹簧原长,不等
于弹簧的长度,故 C 项错误。拉力与伸长量之比是弹簧的劲度系数,由弹簧本身的因素决
定,同一弹簧的劲度系数是不变的,不同的弹簧的劲度系数不同,故 D 项错误。
(8)(经典题,10 分)某同学和你一起探究弹力和弹簧伸长的关系,并测弹簧的劲度系数 k。做
法是先将待测弹簧的一端固定在铁架台上,然后将最小刻度是毫米的刻度尺竖直放在弹簧一
侧,并使弹簧另一端的指针恰好落在刻度尺上。当弹簧自然下垂时,指针指示的刻度数值记
作 L0,弹簧下端挂一个 50 g 的砝码时,指针指示的刻度数值记作 L1;弹簧下端挂两个 50 g
的砝码时,指针指示的刻度数值记作 L2;…;挂七个 50 g 的砝码时,指针指示的刻度数值
记作 L7。
①表格记录的是该同学已测出的 6 个值,其中有两个数值在记录时有误,它们的代表符号分
别是 。
测量记录表:
代表符号 L0 L1 L2 L3 L4 L5 L6 L7
刻度数值/cm 1.70 3.40 5.10 8.60 10.3 12.1
②实验中,L3 和 L7 两个值还没有测定,请你根据下图将这两个测量值填入记录表中。
③充分利用测量数据,该同学将所测得的数值按如下方法逐一求差,分别计算出了三个差值:
d1=L4-L0=6.90 cm,d2=L5-L1=6.90 cm,d3=L6-L2=7.00 cm。
请你给出第四个差值:d4= = cm。
④根据以上差值,可以求出每增加 50 g 砝码的弹簧平均伸长量ΔL。ΔL 用 d1、d2、d3、d4 表
示的式子为ΔL= ,代入数据解得ΔL= cm。
⑤计算弹簧的劲度系数 k= N/m。(g 取 9.8 m/s2)
答案:①L5、L6(2 分) ②6.85(6.84 6.86 均正确)(1 分) 14.05(14.04 14.06 均正确)(1 分)
③L7-L3(1 分) 7.20(1 分) ④d1+d2+d3+d4
4×4
(1 分) 1.75(1 分) ⑤28(2 分)
解析:①刻度尺读数时要估读一位,实验中所用的刻度尺最小分度值为 1 mm,故记录数据
时应记录到 0.1 mm(即 0.01 cm),所以表格中记录有误的是 L5 和 L6。
②由题图知 L3=6.85 cm,L7=14.05 cm。
③利用逐差法并结合已求差值可知第四个差值 d4=L7-L3=14.05 cm-6.85 cm=7.20 cm。
④d1、d2、d3、d4 中每个数据中含有 4 个ΔL,为充分利用数据,取平均值有ΔL=d1+d2+d3+d4
4×4
=6.90+6.90+7.00+7.20
16
cm=1.75 cm
⑤根据胡克定律ΔF=kΔx 可以计算出弹簧的劲度系数为 k=ΔF
ΔL
=mg
ΔL
=50×10-3×9.8
1.75×10-2 N/m=
28 N/m
(9)(2014 全国Ⅱ,9 分)某实验小组探究弹簧的劲度系数 k 与其长度(圈数)的关系。实验装置
如图(a)所示;一均匀长弹簧竖直悬挂,7 个指针 P0、P1、P2、P3、P4、P5、P6 分别固定在弹
簧上距悬点 0、10、20、30、40、50、60 圈处:通过旁边竖直放置的刻度尺,可以读出指针
的位置,P0 指向 0 刻度。设弹簧下端未挂重物时,各指针的位置记为 x0;挂有质量为 0.100
kg 的砝码时,各指针的位置记为 x。测量结果及部分计算结果如表所示(n 为弹簧的圈数,取
重力加速度为 9.80 m/s2)。已知实验所用弹簧总圈数为 60,整个弹簧的自由长度为 11.88 cm。
P1 P2 P3 P4 P5 P6
x0(cm) 2.04 4.06 6.06 8.05 10.03 12.01
x(cm) 2.64 5.26 7.81 10.30 12.93 15.41
n 10 20 30 40 50 60
k(N/m) 163 56.0 43.6 33.8 28.8
1/k(m/N) 0.0061 0.0179 0.0229 0.0296 0.0347
图(a) 图(b)
①将表中数据补充完整: 、 。
②以 n 为横坐标,1
k
为纵坐标,在图(b)给出的坐标纸上画出1
k
-n 图像。
③图(b)中画出的直线可近似认为通过原点,若从实验中所用的弹簧截取圈数为 n 的一段弹
簧,该弹簧的劲度系数 k 与其圈数 n 的关系的表达式为 k= N/m;该弹簧的劲度系
数 k 与自由长度 l0(单位为 m)的关系的表达式为 k= N/m。
(9)答案:①81.7(1 分) 0.0122(2 分) ②见解析(2 分) ③1.73×103
n
(1.66×103
n
1.83×103
n
均正
确)(2 分) 3.42
l0
(3.29
l0
3.62
l0
均正确)(2 分)
解析:①根据 P2 示数可知,P2 部分的原长为 4.06 cm,拉伸后的长度为 5.26 cm,根据胡克
定律可得 k= F
Δx
= 0.1×9.8
(5.26-4.06)×10-2
N/m=81.7 N/m,故1
k
= 1
81.7 m/N=0.0122 m/N
②根据表中的数据画出图像,如图所示。
③由②知1
k
-n 图像的斜率为 k 斜=0.0347
60
=5.78×10-4,故图像解析式为1
k
=5.78×10-4·n,解
得 k=1.73×103
n
N/m。
已知实验所用弹簧总圈数为 60,整个弹簧的自由长度为 11.88 cm,则 n 圈弹簧的自由长度
可近似认为 l0=11.88×10-2
60
n=1.98×10-3·n,由此可见,劲度系数与自由长度的乘积为常数,
即 kl0=3.42,故该弹簧的劲度系数 k 与其自由长度 l0(单位为 m)的关系的表达式为 k=3.42
l0
N/m。
4.实验创新与改进
(10)(2018 改编,6 分)某实验小组为测量一轻质弹簧的劲度系数,组装了如图(a)所示的装置。
将弹簧竖直固定在铁架台上,弹簧下端连接一托盘,待弹簧静止时用刻度尺测量出弹簧的长
度,然后逐渐增加托盘中的砝码,每次用刻度尺测量出弹簧的总长度。以砝码质量 m 为纵
坐标,以弹簧长度 l 为横坐标,建立坐标系,并将测量得到的数据在坐标系中描点,如图(b)
所示。(重力加速度取 g=9.8 m/s2)
图(a) 图(b)
①由图像得弹簧的劲度系数为 N/m(保留 3 位有效数字)。
②分析托盘的质量对本实验结果 (选填“有”或“无”)影响。
③若将砝码盘挂在弹簧自由端 P 的上方 Q 点,其他操作均不变,则求得的弹簧劲度系数
(选填“大于”“小于”或“等于”)①问中求得的弹簧劲度系数。
答案:①3.36(3.34 3.38 均正确)(2 分) ②无(2 分) ③大于(2 分)
解析:①设弹簧原长为 l0,托盘本身质量为 m0,则根据物体的平衡条件,(m+m0)g=k 劲(l-l0),
整 理 得 m = k 劲
g
l - ( k 劲
g
l0 + m0) , 选 取 m-l 图 像 中 两 点 , 计 算 出 图 像 斜 率 为 k 斜 =
25.0×10-3
(18.3-11.0)×10-2 kg/m=0.342 kg/m,故弹簧的劲度系数 k 劲=k 斜 g=3.36 N/m(3.34 3.38
均正确)。
②由表达式 m=k 劲
g
l-(k 劲
g
l0+m0)可知,托盘的质量影响图像的横轴截距,但不影响直线的斜
率,故托盘质量对本实验结果无影响。
③当砝码质量 m 一定时,砝码盘固定在 Q 点的伸长量比固定在 P 点伸长量要小,根据胡克
定律 k 劲=ΔF
Δx
=Δm
Δxg 可知,弹簧的劲度系数变大,即大于①问中求得的弹簧劲度系数。
(11)(经典题,6 分)小组成员设计了如图(a)所示的实验装置,研究弹簧的弹力与压缩量的关
系。弹簧放置在水平桌面上,左端用挡板固定并与刻度尺的 0 刻度对齐,穿过挡板上小孔与
弹簧轴线的细线一端与弹簧右端相连,另一端绕过固定在桌边的定滑轮并悬挂钩码,图中指
针所示的位置示数为 cm,若每个钩码的重力为 1 N,改变所挂钩码的个数,测出悬
挂不同钩码时弹簧的长度,作出钩码重力 G 与弹簧长度 L 的关系图像如图(b)所示,若测得
的数据均在弹簧的弹性限度内,由图可知,弹簧的原长为 cm,弹簧的劲度系数
为 。
图(a)
图(b)
答案:1.50(1.48 1.52 均正确)(2 分) 2.00(2 分) 388 N/m(381 395 均正确)(2 分)
解析:刻度尺所指的示数为 1.50 cm;当悬挂钩码的重力为零时,弹簧的长度就为弹簧的原
长,由题图(b)可知,弹簧的原长为 2.00 cm;弹簧的劲度系数为图像斜率的绝对值,即 k=
3.1
(2-1.2)×10-2 N/m=388 N/m。
(12)(经典题,6 分)某同学利用图(a)所示装置来研究弹簧弹力与形变的关系。设计的实验如
下:A、B 是质量均为 m0 的小物块,A、B 间由轻弹簧相连,A 的上面通过轻绳绕过两个定
滑轮与一个轻质挂钩相连。挂钩上可以挂上不同质量的物块 C,物块 B 下放置一压力传感器。
物块 C 右边有一个竖直的直尺,可以测出挂钩下移的距离。整个实验中弹簧均处于弹性限
度内,重力加速度 g=9.8 m/s2。实验操作如下:
图(a) 图(b)
a.不悬挂物块 C,让系统保持静止,确定挂钩的位置 O,并读出压力传感器的示数 F0;
b.每次挂上不同质量的物块 C,用手托住,缓慢释放。测出系统稳定时挂钩相对 O 点下移
的距离 xi,并读出相应的压力传感器的示数 Fi;
c.以压力传感器示数为纵轴,挂钩下移距离为横轴,根据每次测量的数据,描点作出 F-x
图像如图(b)所示。
①由图像可知,在实验误差范围内,可以认为弹簧弹力与弹簧形变量成 (选填“正
比”“反比”“不确定关系”);
②由图像可知,弹簧劲度系数 k= N/m;
③如果挂上物块 C 的质量 mC=3m0,并由静止释放。当压力传感器的示数为零时,物块 C
的速度 v0= m/s。
答案:①正比(2 分) ②98(2 分) ③1.4(2 分)
解析:①对 B 受力分析,根据平衡条件有 F 弹+mg=F,可见 F 与弹簧弹力成线性关系,又
F 与 x 成线性关系,可知弹簧的弹力与弹簧的形变量成正比。
②由题意可知,F-x 图线斜率的绝对值表示弹簧的劲度系数,则 k=19.6
0.2 N/m=98 N/m。
③开始时未挂物块 C,弹簧处于压缩状态,形变量为Δx1=m0g
k
,当压力传感器示数为零时,
弹簧处于伸长状态,形变量为Δx2=m0g
k
,从开始到压力传感器示数为零的过程中,弹簧形变
量一样,则弹簧的弹性势能不变。根据系统机械能守恒有(mC-m0)gh=1
2(mC+m0)v20,将 h
=0.2 m,mC=3m0 代入式中,解得 v0=1.4 m/s。
5.教材原型实验
(13)(2017 全国Ⅲ,6 分)某探究小组做“验证力的平行四边形定则”实验,将画有坐标轴(横
轴为 x 轴,纵轴为 y 轴,最小刻度表示 1 mm)的纸贴在桌面上,如图(a)所示。将橡皮条的一
端 Q 固定在 y 轴上的 B 点(位于图示部分之外),另一端 P 位于 y 轴上的 A 点时,橡皮条处
于原长。
①用一只测力计将橡皮条的 P 端沿 y 轴从 A 点拉至坐标原点 O,此时拉力 F 的大小可
由测力计读出。测力计的示数如图(b)所示,F 的大小为 N。
②撤去①中的拉力,橡皮条 P 端回到 A 点;现使用两个测力计同时拉橡皮条,再次将 P
端拉至 O 点,此时观察到两个拉力分别沿图(a)中两条虚线所示的方向,由测力计的示数读
出两个拉力的大小分别为 F1=4.2 N 和 F2=5.6 N。用 5 mm 长度的线段表示 1 N 的力,以 O
点为作用点,在图(a)中画出力 F1、F2 的图示,然后按平形四边形定则画出它们的合力 F 合。
F 合的大小为 N,F 合与拉力 F 的夹角的正切值为 。若 F 合与拉力 F 的大小
及方向的偏差均在实验所允许的误差范围之内,则该实验验证了力的平行四边形定则。
答案:①4.0(2 分) ②4.0(2 分) 0.05(2 分)
解析:①由题图可知,弹簧测力计的最小刻度为 0.2 N,指针正好指在 4 的位置,可见弹簧
测力计的示数为 4.0 N,即 F 的大小为 4.0 N。
②根据题中所给力的标度“即用 5 mm 长度的线段表示 1 N 的力”,用刻度尺作出 F1、F2
的图示,以 F1、F2 为邻边作平行四边形,平行四边形的对角线就是合力 F 合的图示,根据力
的图示及力的标度计算出合力的大小为 F 合=20
5
×1 N=4.0 N。
根据数学几何关系知,F 合与拉力 F 的夹角的正切值为 tan α≈ 1
20
=0.05。
(14)(2018 改编,10 分)某实验小组要做“验证力的平行四边形定则”的实验。
①实验室提供了以下器材,其中多余的器材是 (选填序号)。
A.方木板 B.图钉(几个)
C.白纸 D.天平
E.刻度尺 F.弹簧测力计(两只)
G.橡皮条 H.细绳套(两个)
I.铅笔 J.三角板
②实验小组成员根据实验器材,设计了如下操作步骤:
A.在桌上放一块方木板,在方木板上铺一张白纸,用图钉把白纸钉在方木板上;
B.用图钉把橡皮条的一端固定在板上的 A 点,在橡皮条的另一端系上两条细绳形成结点,
细绳的另一端系着绳套;
C.如图(a)所示,用两个弹簧测力计分别钩住绳套,互成角度地拉橡皮条,使橡皮条伸长,
结点到达某一位置 O,记下 O 点的位置,读出并记录两个弹簧测力计的示数;
D.按选好的标度,用铅笔和刻度尺作出两个弹簧测力计的拉力 F1 和 F2 的图示,并以 F1 和
F2 为邻边作平行四边形,画出它们所夹的对角线;
E.只用一个弹簧测力计,通过绳套拉橡皮条使其伸长,读出并记录弹簧测力计的示数,记
下细绳的方向,按同一标度作出这个力 F′的图示,如图(b)所示;
F.比较 F′和 F 的大小和方向,看它们是否相同,得出结论。
上述步骤中有两个步骤出现疏漏,请指出疏漏:
;
。
③按照正确实验步骤操作,如图(c)所示用力的图示法在纸上画出表示三个力的箭头,表示
F1 和 F2 的线段为邻边作平行四边形,由图可得,F1 和 F2 的合力 F= N。
④上述实验中,表示 F′的线段不在平行四边形的对角线上,误差产生的原因可能有哪些?
答: (写
出两个原因)。
⑤对于图(c)中的 F 和 F′,方向一定沿 AO 方向的是 ; 是 F1 与 F2 合成的理
论值; 是 F1 与 F2 合成的实际值。在实验中如果将两个细绳套换成两根橡皮条,那
么实验结果 (选填“变化”或“不变”)。
答案:①D(1 分) ②步骤 C 中没有记下两条细绳的方向(1 分) 步骤 E 中没有使结点到达同
样的位置 O(1 分) ③3.0(1 分) ④力的测量有误差(1 分) 作图不准确(1 分) ⑤F′(1 分)
F(1 分) F′(1 分) 不变(1 分)
解析:①做“验证力的平行四边形定则”的实验,是让两个力拉橡皮条和一个力拉橡皮条产
生的作用效果相同,测出两个力的大小和方向以及一个力的大小和方向,画出这三个力的图
示,用平行四边形作出两个力的合力的理论值,和那一个力进行比较。我们需要的实验器材
有方木板(固定白纸),白纸(记录力的方向和画图)、刻度尺(选标度)、绳套(弹簧测力计拉橡
皮条)、弹簧测力计(测力的大小)、图钉(固定白纸和橡皮条的一端)、三角板(画平行四边形)、
橡皮条(让力产生相同的作用效果)、铅笔(作图),所以多余的器材是天平,故 D 项符合题意。
②步骤 C 中只有记下两条细绳的方向,才能确定两个分力的方向,进一步才能根据平行四
边形定则求合力;步骤 E 中只有使结点到达同样的位置 O,才能表示两种情况下力的作用
效果相同。
③由题图可得,F1 和 F2 的合力 F=3.0 N。
④上述实验误差产生的原因可能有力的测量有误差、作图不准确、力的方向记录不准确等。
⑤方向一定沿 AO 方向的是 F′,F1 与 F2 合成的理论值是通过平行四边形定则算出的值,而
实际值是单独一个力拉到 O 点时的值,因此 F′是 F1 与 F2 合成的实际值,F 是 F1 与 F2 合成
的理论值。将两个细绳套换成两根橡皮条,但仍将结点拉到 O 点,作用效果相同,故不会
影响实验结果。
(15)(2014 江苏单 ,8 分)小明通过实验验证力的平行四边形定则。
①实验记录纸如图(a)所示,O 点为橡皮条被拉伸后伸长到的位置,两弹簧测力计共同作用
时,拉力 F1 和 F2 的方向分别过 P1 和 P2 点;一个弹簧测力计拉橡皮条时,拉力 F3 的方向过
P3 点。三个力的大小分别为 F1=3.30 N、F2=3.85 N 和 F3=4.25 N。请根据图中给出的标度
作图求出 F1 和 F2 的合力。
②仔细分析实验,小明怀疑实验中的橡皮条被多次拉伸后弹性发生了变化,影响实验结果。
他用弹簧测力计先后两次将橡皮条拉伸到相同长度,发现读数不相同,于是进一步探究了拉
伸过程对橡皮条弹性的影响。
实验装置如图(b)所示,将一张白纸固定在竖直放置的木板上,橡皮条的上端固定于 O 点,
下端 N 挂一重物。用与白纸平行的水平力缓慢地移动 N,在白纸上记录下 N 的轨迹。重复
上述过程,再次记录下 N 的轨迹。
两次实验记录的轨迹如图(c)所示。过 O 点作一条直线与轨迹交于 a、b 两点,则实验中橡皮
条分别被拉伸到 a 和 b 时所受拉力 Fa、Fb 的大小关系为 。
③根据②中的实验,可以得出的实验结果有哪些? (填写选项前的字母)
A.橡皮条的长度与受到的拉力成正比
B.两次受到的拉力相同时,橡皮条第 2 次的长度较长
C.两次被拉伸到相同长度时,橡皮条第 2 次受到的拉力较大
D.两次受到的拉力相同时,拉力越大,橡皮条两次的长度之差越大
④根据小明的上述实验探究,请对验证力的平行四边形定则实验提出两点注意事项。
答案:①F 合=4.70 N(4.60 4.80 均正确)(2 分) ②Fa=Fb(1 分) ③BD(2 分) ④橡皮条拉伸
不宜过长(1.5 分) 选用新橡皮条(1.5 分)(或:拉力不宜过大;选用弹性好的橡皮条;换用弹
性好的弹簧)
解析:①根据所给标度,用刻度尺作出 F1、F2 的图示,作平行四边形得到合力,根据标度
作出合力的图示,如图所示得到合力的大小约为 4.7 N。
②由题图可知,N 在 a 点和在 b 点时橡皮条与竖直方向的夹角相同,设为θ,根据力的平衡
可知,橡皮条的拉力都为 Fcos θ=mg,因此 Fa=Fb。
③橡皮条的长度在拉力为零时,长度并不为零,故 A 项错误。从②实验可知,两次拉力相
同时,第 2 次橡皮条的长度长,故 B 项正确。两次长度相同时,第 2 次橡皮条与竖直方向
的夹角小,由 Fcos θ=mg 知,橡皮条的拉力小,故 C 项错误。两次拉力相同时,橡皮条与
竖直方向的夹角相同,拉力越大,橡皮条与竖直方向的夹角越大,从题图上可以得到两次橡
皮条长度的差值越大,故 D 项正确。
(16)(2016 浙江理综,8 分)某同学在“探究弹簧和弹簧伸长的关系”的实验中,测得图中弹
簧 OC 的劲度系数为 500 N/m。如图(a)所示,用弹簧 OC 和弹簧测力计 a、b 做“探究求合
力的方法”实验。在保持弹簧伸长 1.00 cm 不变的条件下,
①若弹簧测力计 a、b 间夹角为 90°,如图(b)所示中弹簧测力计 a 的读数是 N,则弹
簧测力计 b 的读数可能为 N。
②若弹簧测力计 a、b 间夹角大于 90°,保持弹簧测力计 a 与弹簧 OC 的夹角不变,减小弹簧
测力计 b 与弹簧 OC 的夹角,则弹簧测力计 a 的读数是 、弹簧测力计 b 的读数
(选填“变大”“变小”或“不变”)。
答案:①3.00(2 分) 4.00(2 分) ②变大(2 分) 变大(2 分)
解析:①根据胡克定律可知,弹簧 OC 的弹力为 FOC=kx=500×0.01 N=5 N,根据弹簧测
力计的读数方法可知,a 的读数为 3.00 N,两弹簧测力计夹角为 90°,根据几何关系即可求
得 b 的读数 Fb= F2OC-F2a= 52-32 N=4.00 N。
②若弹簧测力计 a、b 间夹角大于 90°,保持弹簧测力计 a 与弹簧 OC 的夹角不变,减小弹簧
测力计 b 与弹簧 OC 的夹角,即增大弹簧测力计 a 与弹簧测力计 b 之间的夹角,如图所示,
可知两弹簧测力计的示数均变大。
(17)(2015 山东理综,10 分)某同学通过下述实验验证力的平行四边形定则。实验步骤:
A.将弹簧测力计固定在贴有白纸的竖直木板上,使其轴线沿竖直方向。
B.如图(a)所示,将环形橡皮条一端挂在弹簧测力计的秤钩上,另一端用圆珠笔尖竖直向下
拉,直到弹簧测力计示数为某一设定值时,将橡皮条两端的位置标记为 O1、O2,记录弹簧
测力计的示数 F,测量并记录 O1、O2 间的距离(即橡皮条的长度 l)。每次将弹簧测力计示数
改变 0.50 N,测出所对应的 l,部分数据如表所示:
F(N) 0 0.50 1.00 1.50 2.00 2.50
l(cm) l0 10.97 12.02 13.00 13.98 15.05
C.找出 B 中 F=2.50 N 时橡皮条两端的位置,重新标记为 O、O′,橡皮条的拉力记为 FOO′。
D.在秤钩上涂抹少许润滑油,将橡皮条搭在秤钩上,如图(b)所示。用两圆珠笔尖成适当角
度同时拉橡皮条的两端,使秤钩的下端达到 O 点,将两笔尖的位置标记为 A、B,橡皮条
OA 段的拉力记为 FOA,OB 段的拉力记为 FOB。
完成下列作图和填空:
①利用表中数据在给出的坐标纸上画出 F-l 图线,根据图线求得 l0= cm。
②测得 OA=6.00 cm,OB=7.60 cm,则 FOA 的大小为 N。
③根据给出的标度,在图中作出 FOA 和 FOB 的合力 F′的图示。
④通过比较 F′与 的大小和方向,即可得出实验结论。
答案:①10.0(2 分) 见解析(2 分) ②1.80(2 分) ③见解析(2 分) ④Foo′(2 分)
解析:①根据表格中数据利用描点法作出图像如图所示;图像与横坐标的交点即为 l0;由图
可知 l0=10.0 cm。
②橡皮条两端拉力相等,根据题意 AB 的总长度为 6.00 cm+7.60 cm=13.60 cm;由图可知,
此时两端拉力 F=1.80 N。
③根据给出的标度,作出合力如图所示。
④根据等效替代法,只要作出的合力与实验得出的合力 Foo′大小和方向在误差允许的范围内
相等,即可说明力的平行四边形定则成立。
6.实验创新与改进
(18)(经典题,8 分)某同学用如图所示的实验装置验证“力的平行四边形定则”。弹簧测力
计 A 挂于固定点 P,下端用细线挂一重物 M。弹簧测力计 B 的一端用细线系于 O 点,手持
另一端向左拉,使结点 O 静止在某位置。分别读出弹簧测力计 A 和 B 的示数,并在贴于竖
直木板的白纸上记录 O 点的位置和拉线的方向。
①本实验用的弹簧测力计示数的单位为 N,图中 A 的示数为 N。
②下列不必要的实验要求是 (请填写选项前对应的字母)。
A.应测量重物 M 所受的重力
B.弹簧测力计应在使用前校零
C.拉线方向应与木板平面平行
D.改变拉力,进行多次实验,每次都要使 O 点静止在同一位置
③某次实验中,该同学发现弹簧测力计 A 的指针稍稍超出量程,请您提出两个解决办
法 、 。
答案:①3.6(2 分) ②D(2 分) ③改变弹簧测力计 B 的方向(2 分) 减小重物的质量(2 分)
解析:①弹簧测力计读数,每 1 N 被分成 5 格,则 1 格就等于 0.2 N,题图指针落在 3 N 到
4 N 的第 3 格处,故读数为 3.6 N。
②实验通过作出三个力的图示,来验证“力的平行四边形定则”,因此重物的重力必须要知
道,故 A 项需要。弹簧测力计是测量力的大小,所以要准确必须在测量之前校零,故 B 项
需要。拉线方向必须与木板平面平行,这样才能确保力大小的准确性,故 C 项需要。每次
实验过程中,没必要保证 O 点位置一致,因为该实验是验证三个力的关系,只要测出三力
大小、方向即可,跟 O 点位置无关,故 D 项不需要。
③由于挂重物的细线力的方向已确定,所以要么减小重物的质量,要么改变测力计 B 拉细
线的方向,从而使测力计 A 不超出量程。
(19)(经典题,6 分)小组成员用一只弹簧测力计和一个量角器等器材来验证力的平行四边形
定则,他们设计了如图所示的实验装置,固定在竖直木板上的量角器的直边水平,橡皮条的
一端固定于量角器的圆心 O 的正上方 A 处,另一端系绳套 1 和绳套 2。
①请你完善实验步骤:
A.弹簧测力计挂在绳套 1 上竖直向下拉橡皮条,使橡皮条的结点到达 O 处,记下弹簧测力
计的示数 F;
B.弹簧测力计挂在绳套 1 上,手拉着绳套 2,缓慢拉橡皮条,使橡皮条的结点到达 O 处,
此时绳套 1 沿 0°方向,绳套 2 沿 120°方向,记下弹簧测力计的示数 F1;
C.根据力的平行四边形定则计算绳套 1 的拉力 F1′= ;
D.比较 ,即可初步验证;
E.只改变绳套 2 的方向,重复上述实验步骤。
②保持绳套 2 方向不变,绳套 1 从图示位置向下缓慢转动 90°,此过程中保持橡皮条的结点
在 O 处不动,关于绳套 1 的拉力大小的变化,下列结论正确的是 。
A.逐渐增大 B.先增大后减小
C.逐渐减小 D.先减小后增大
答案:① 3
3 F(2 分) F1 和 F′1(2 分) ②D(2 分)
解析:①根据力的平行四边形定则计算绳套 1 的拉力 F1′=Ftan 30°= 3
3 F,通过比较 F1 和 F′1,
在误差允许范围内相同,则可初步验证。
②绳套 1 在转动过程中,保持绳套 2 方向不变,合力保持不变,根据平行四边形定则画出力
的图示,由图示可知,绳套 1 的拉力大小先减小后增大,故 D 项正确。
(20)(2018 改编,6 分)小芳同学通过以下实验来验证“力的平行四边形定则”。如图所示,
将一方形薄木板平放在桌面上,并在板面上用图钉固定好白纸,将三个弹簧测力计的挂钩用
细线系在小铁环上,两个弹簧测力计固定在木板上,在板面内沿某一方向拉第三个弹簧测力
计,当小铁环 时,分别记录三个测力计示数 F1、F2、F3 的大小和 ,并作
出力的图示。接着,小芳同学按平行四边形定则作出了 F2、F3的合力 F23,通过比较 的
关系,即可得出结论。
答案:平衡(2 分) 方向(2 分) F23 与 F1(2 分)
解析:共点力作用下物体的平衡条件是合外力为零,三个力合力为零,则任意两个力的合力
与第三个力大小相等,方向相反,作用在同一条直线上(如图所示)。根据平行四边形定则作
出其中两个力的合力,与第三个力进行比较即可得出结论。
(21)(经典题,6 分)小组成员拿来一个水杯,又找来两个弹簧测力计,设计了一个“验证力
的平行四边形定则”的实验。操作的步骤如下:
A.在墙上贴一张白纸用来记录弹簧测力计弹力的大小和方向;
B.在一个弹簧测力计的下端悬挂装满水的水杯,记下静止时弹簧测力计的读数 F;
C.将一根大约 30 cm 长的细线从杯带中穿过,再将细线两端分别拴在两个弹簧测力计的挂
钩上。在靠近白纸处用手对称地拉开细线,使两个弹簧测力计的示数相等,在白纸上记下细
线的方向,弹簧测力计的示数如图(a)所示;
D.在白纸上按一定标度作出两个弹簧测力计的弹力的图示,如图(b)所示,根据力的平行四
边形定则可求出这两个力的合力 F′。
①在步骤 C 中,弹簧测力计的示数为 N。
②在步骤 D 中,合力 F′= N。
③若 ,就可以验证力的平行四边形定则。
答案:①3.00(2 分) ②5.2(5.1 5.3 均正确)(2 分) ③F′在竖直方向且数值与 F 近似相等(2 分)
解析:①在步骤 C 中,弹簧测力计的示数为 3.00 N。
②以两个分力为邻边作出平行四边形,如图所示
根据力的图示,可以测量出合力的大小大约为 5.2 N。
③根据实验原理可知,只要合力的大小与水杯重力大小相等,方向与重力方向相反,即可验
证力的平行四边形定则。故 F′近似在竖直方向,且数值与 F 近似相等,就可以验证力的平
行四边形定则。
(22)(经典题,5 分)在“探究求合力的方法”实验中,现有木板、白纸、图钉、橡皮条、细
绳套和一个弹簧测力计。
①为完成实验,某同学另找来一根弹簧,先测量其劲度系数,得到实验数据如下表:
弹力 F(N) 0.50 1.00 1.50 2.00 2.50 3.00 3.50
伸长量 x(10-2m) 0.74 1.80 2.80 3.72 4.68 5.58 6.42
用作图法求得该弹簧的劲度系数 k= N/m。
②某次实验中,弹簧测力计的指针位置如图(a)所示,其读数为 N,同时利用①中结
果获得弹簧的弹力值为 2.50 N,请在图(b)中画出这两个共点力的合力 F 合。
③由图得到 F 合= N。
答案:①54(53 55 均正确)(2 分) ②2.20(1 分) ③3.3(3.1 3.5 均正确)(2 分)
解析:①根据描点法作出图像,如图所示。
图像的斜率表示弹簧的劲度系数,故
k=ΔF
Δx
= 2.5
0.046 N/m=54 N/m。
②弹簧测力计的读数为 F=2.20 N,根据力的图示法作出两个分力(2.20 N 和 2.50 N)的图示,
以这两个力为邻边,作出平行四边形,对角线即为合力。
③根据图像及力的标度计算出合力的大小为 F 合=3.3 N。
7.教材原型实验
(23)(2018 改编,14 分)为了探究加速度与力、质量的关系,某实验小组成员安装了如图(a)
所示实验装置。
①请你指出装置中存在的错误。
a. ;
b. ;
c. ;
d. 。
②按正确的要求重新安装好实验装置后,探究加速度与力的关系,该小组成员进行了下述操
作:
A.改变沙和沙桶的质量,重复 C 步骤的操作
B.平衡摩擦力,使小车做匀速直线运动
C.测出沙和沙桶的质量 m,挂上沙桶,接通电源,放开小车,打出一条纸带
D.分别求出各纸带对应的小车加速度
E.根据测量数据,作出 a-F(mg)图像
以上步骤的合理顺序为 (填步骤前序号)。
③实验中,平衡摩擦力的目的是 ;调整沙的多少,必须使沙
和 沙 桶 的 总 质 量 m 远 小 于 小 车 和 砝 码 的 总 质 量 M , 这 样 做 的 目 的
是 。
④已知打点计时器所使用的交流电源频率为 50 H ,某次实验打出的纸带如图(b),纸带中每
相邻两个计数点间还有 4 个点未画出,利用图(b)给出的数据可求出小车运动的加速度 a=
m/s2。(结果保留三位有效数字)
⑤如果根据某次实验测得的多组加速度与力的数据,作 a-F 图像如图(c)所示,形成这个图像
的原因是:平衡摩擦力时长木板倾角 (选填“过大”或“过小”);悬挂沙和沙桶质
量 (选填“太大”或“太小”)。
⑥小组成员又利用上述实验装置探究了加速度与质量关系。保持沙桶及其内部所装沙的质量
m 不变,多次增加小车上的砝码个数,并记录每次增加砝码后小车及砝码的总质量 M 值,
挂上沙桶,接通电源,放开小车,打出一条纸带,测量并计算出对应的加速度,实验数据如
下表所示:
1
M/(kg-1) 4.0 3.6 3.0 2.0 1.4 1.0
a/(m·s-2) 1.2 1.1 0.9 0.6 0.4 0.3
请根据表中数据在图(d)中描点并作出 a- 1
M
图像,根据 a- 1
M
图像求得合力大小为 N(计
算结果保留两位有效数字);重新实验后,如果作出的图像如图(e)所示,造成图像如图(e)所
示的原因是 、 。
答案:①a.长木板右端未垫高以平衡摩擦力(1 分) b.没有用交流电源而是用了直流电源(1
分) c.牵引小车的细绳没有与木板平行(1 分) d.开始实验时,小车离打点计时器太远
(1 分) ②BCADE(1 分) ③使小车受到的合力等于绳的拉力(1 分) 使细绳上的拉力近似
等于沙和沙桶的重力(1 分) ④1.58(1 分) ⑤过小(1 分) 太大(1 分) ⑥见解析(1 分) 0.30
N(1 分) 平衡摩擦力过度(1 分) 不再满足 m
≪
M(1 分)
解析:①安装仪器时需要平衡摩擦力,即将木板一端垫高;细绳与木板平行,以保证拉力在
小车前进的方向上;打点计时器需要用交流电源;释放小车时应让小车从靠近计时器处释放,
这是为了在纸带上打尽量多的点。
②首先安装器材,平衡摩擦力,使小车做匀速直线运动;然后测出沙和沙桶的质量 m,挂上
沙桶,接通电源,放开小车,打出一条纸带;改变沙和沙桶的质量,更换纸带,重复实验,
得到多条纸带;求出各纸带对应的小车加速度;最后根据测量数据,作出 a-F(mg)图像,故
顺序为 BCADE。
③实验中平衡摩擦力后,小车与斜面间的摩擦力跟小车沿斜面方向的分力相平衡,即
Mgsin θ=μMgcos θ,此时细绳对小车的拉力 T 就是小车所受的合力,故平衡摩擦力的目的
是使小车受到的合力等于细绳上的拉力,便于测量小车受到的合力。
设小车和砝码的总质量为 M,沙和沙桶的总质量为 m,将两者看成一个整体,对整体有 mg
=(m+M)a,对小车有 T=Ma,联立可得 T=Ma= Mmg
M+m
= mg
1+m
M
,只有当 m
≪
M 时,才有
T≈mg。因此保证沙和沙桶的总质量 m 远小于小车和砝码的总质量 M 是为了使细绳上的拉
力近似等于沙和沙桶的重力。
④根据Δx=aT2,运用逐差法得 a=xCF-xOC
9T2
,其中 T= 1
50
×5 s=0.1 s,代入数据解得 a=1.58
m/s2。
⑤由图(c)可知,图像横轴截距不为零,即当沙和沙桶的质量 m 增大到一定值时,小车才具
有非零的加速度,这是由平衡摩擦力不足或没有平衡摩擦力,即木板的倾角过小所导致的。
基于 a= mg
m+M
进行分析,由③可知 T≈mg,故 a= 1
m+M·T,可见,连接数据点和坐标系原
点的直线斜率为 1
m+M
。当不再满足 m 远小于 M 时,即悬挂沙和沙桶质量过大,导致图像
发生弯曲。
⑥根据表中实验数据在坐标系内描出对应点,然后根据描出的点作出图像如图所示。
根据牛顿第二定律,可得 F=Ma,整理得 a=F 1
M
,故 a- 1
M
图像的斜率即为小车受到的合力,
选取图像上相距较远的两点进行计算有 F=1.2-0
4-0
N=0.30 N。
由图(e)可知,图像纵轴截距不为零,即当 M 无限增大时,小车具有非零的加速度,这是平
衡摩擦力过度所导致的。
基于 T= mg
m
M
+1
进行分析,可得 a= mg
m
M
+1
· 1
M
,可见,连接数据点和坐标系原点的直线斜率为
mg
m
M
+1
。若 m 为定值,则随着 M 的减小,此斜率会减小,当不再满足 M
≫
m 时,图像会向下
弯曲。
(24)(经典题,9 分)图(a)为验证牛顿第二定律的实验装置示意图。图中打点计时器的电源为
50 H 的交流电源,打点的时间间隔用Δt 表示。在小车质量未知的情况下,某同学设计了一
种方法用来研究“在外力一定的条件下,物体的加速度与其质量间的关系”。
①完成下列实验步骤中的填空。
A.平衡小车所受的阻力:小吊盘中不放物块,调整木板右端的高度,用手轻拨小车,直到
打点计时器打出一系列 的点。
B.按住小车,在小吊盘中放入适当质量的物块,在小车中放入砝码。
C.打开打点计时器电源,释放小车,获得带有点列的纸带,在纸带上标出小车中砝码的质
量 m。
D.按住小车,改变小车中砝码的质量,重复步骤 C。
E.在每条纸带上清晰的部分,每 5 个间隔标注一个计数点。测量相邻计数点的间距 s1,s2,…。
求出与不同 m 相对应的加速度 a。
F.以砝码的质量 m 为横坐标,1
a
为纵坐标,在坐标纸上作出1
a-m 关系图线。若加速度与小
车和砝码的总质量成反比,则1
a
与 m 应成 关系(选填“线性”或“非线性”)。
②完成下列填空。
a.本实验中,为了保证在改变小车中砝码的质量时,小车所受的拉力近似不变,小吊盘和
盘中物块的质量之和应满足的条件是 。
b.设纸带上三个相邻计数点的间距为 s1、s2、s3。a 可用 s1、s3 和Δt 表示为 a= 。
图(b)为用刻度尺测量某一纸带上的 s1、s3 的情况,由图可读出 s1= mm,s3=
mm。由此求得加速度的大小 a= m/s2。
c.图(c)为所得实验图线的示意图。设图中直线的斜率为 k,在纵轴上的截距为 b,若牛顿第
二定律成立,则小车受到的拉力为 ,小车的质量为 。
答案:①等间距(1 分) 线性(1 分) ②a.小吊盘和盘中物块的质量之和远小于小车和砝码的
总质量(1 分) b. s3-s1
50(Δt)2(1 分) 24.5(1 分) 47.0(1 分) 1.13(1 分) c.1
k(1 分) b
k(1 分)
解析:①在平衡摩擦力时,小吊盘中不放物块,调整木板右端的高度,用手轻拨小车,直到
打点计时器在纸带上打出一系列等间距的点,则此时说明小车做匀速运动。
已知加速度 a 与小车和砝码的总质量成反比,则1
a
与小车和砝码的总质量成正比,故1
a
与 m
成线性关系。
②a.探究牛顿第二定律实验,当小吊盘和盘中物块的质量之和远小于小车和车中砝码的总质
量时,可以近似认为小车受到的拉力等于小吊盘和盘中物块受到的重力,认为小车受到的拉
力不变。
b.由匀变速直线运动的推论Δx=at2 可知加速度为
a= s3-s1
2(5Δt)2
= s3-s1
50(Δt)2
。
由图示刻度尺可知 s1=3.70 cm-1.25 cm=2.45 cm=24.5 mm,s3=12.00 cm-7.30 cm=4.70
cm=47.0 mm。
由频率为 50 H 可得Δt=0.02 s,加速度为 a= s3-s1
50(Δt)2
=(47.0-24.5)×10-3
50×0.022 m/s2=1.13
m/s2。
c.设小车质量为 M,由牛顿第二定律得 F=(M+m)a,根据题意整理出1
a-m 的解析式为1
a
=1
F·m
+M
F
,由解析式可知 k=1
F
,则小车受到的拉力为 F=1
k
;b=M
F
,将 F=1
k
代入,解得小车的
质量为 M=b
k
。
(25)(2018 改编,8 分)某实验小组利用图(a)所示的实验装置探究加速度与物体质量、物体受
力的关系。
①在平衡小车与桌面之间摩擦力的过程中,打出了一条纸带如图(b)所示。打点计时器打点
的时间间隔为 0.02 s。从比较清晰的点起,每 5 个点取一个计数点,量出相邻计数点之间的
距离。该小车的加速度 a= m/s2。(结果保留两位有效数字)
②平衡摩擦力后,将 5 个相同的砝码都放在小车上。挂上砝码盘,然后每次从小车上取一个
砝码添加到砝码盘中,测量小车的加速度。小车的加速度 a 与砝码盘中砝码总重力 F 的实
验数据如下表。请根据实验数据在图(c)坐标中作出 a-F 的关系图像。
砝码盘中砝码总重力 F(N) 0.20 0.40 0.59 0.78 0.98
加速度 a(m·s-2) 0.69 1.18 1.66 2.18 2.70
③根据提供的实验数据做出的 a-F 图线不通过原点,请说明主要原因。
④甲、乙两同学在同一实验室,各取一套如图(a)所示的装置放在水平桌面上,小车上均不
放砝码,在没有平衡摩擦力的情况下,研究加速度 a 与拉力 F 的关系,分别得到图(d)中甲、
乙两条直线。设甲、乙两同学所用的小车质量分别为 m 甲、m 乙,与木板间的动摩擦因数分
别为μ甲、 μ乙,由图(d)可知,m 甲 m 乙,μ甲 μ乙(选填“大于”“小于”或“等
于”)。
答案:①0.16(2 分) ②见解析(1 分) ③未计入砝码盘的重力(1 分) ④小于(2 分) 大于(2
分)
解析:①每 5 个点取一个计数点,相邻计数点之间时间间隔是 T=0.1 s,设第一段位移为 x1,
第二段位移为 x2,由Δx=aT2 得 a=x2-x1
T2
=0.16 m/s2。
②根据表中的数据,合理地设计横纵坐标的刻度值,据数据确定点的位置,将各点用一条直
线连起来,延长交于坐标轴某一点,如图所示。
③未放入砝码时,小车已有加速度,其主要原因是未计入砝码盘的重力。
④当没有平衡摩擦力时有 F-μmg=ma,故 a=1
mF-μg,即图像斜率为1
m
,纵轴截距的绝对
值为μg。观察图像可知 m 甲<m 乙,μ甲>μ乙。
8.实验创新与改进
(26)(2016 全国Ⅲ,8 分)某物理课外小组利用图(a)中的装置探究物体加速度与其所受合力之
间的关系。图中置于实验台上的长木板水平放置,其右端固定一轻滑轮:轻绳跨过滑轮,一
端与放在木板上的小车相连,另一端可悬挂钩码。本实验中可用的钩码共有 N=5 个,每个
质量均为 0.010 kg。实验步骤如下。
①将 5 个钩码全部放入小车中,在长木板左下方垫上适当厚度的小物块,使小车(和钩码)可
以在木板上匀速下滑。
②将 n(依次取 n=1,2,3,4,5)个钩码挂在轻绳右端,其余 N-n 个钩码仍留在小车内;用
手按住小车并使轻绳与木板平行。释放小车,同时用传感器记录小车在时刻 t 相对于其起始
位置的位移 s,绘制 s-t 图像,经数据处理后可得到相应的加速度 a。
③对应于不同的 n 的 a 值见下表。n=2 时的 s-t 图像如图(b)所示,由图(b)求出此时小车的
加速度(保留两位有效数字),将结果填入下表。
n 1 2 3 4 5
a/(m·s-2) 0.20 0.58 0.78 1.00
④利用表中的数据在图(c)中补齐数据点,并作出 a-n 图像。从图像可以看出:当物体质量一
定时,物体的加速度与其所受的合力成正比。
⑤利用 a-n 图像求得小车(空载)的质量为 kg(保留两位有效数字,重力加速度取 g=
9.8 m/s2)。
⑥若以“保持木板水平”来代替步骤①,下列说法正确的是 (填入正确选项前的标
号)。
A.a-n 图线不再是直线
B.a-n 图线仍是直线,但该直线不过原点
C.a-n 图线仍是直线,但该直线的斜率变大
答案:③0.40(2 分) ④见解析(2 分) ⑤0.44(2 分) ⑥BC(2 分)
解析:③因为小车做初速度为零的匀加速直线运动,故将图(b)中的(2,0.80)代入 s=1
2at2 可
得 a=0.40 m/s2。
④根据描点法可得如图所示图线。
⑤根据牛顿第二定律可得 nmg=(M+5m)a,整理得 a= mg
M+5m
·n,故 a-n 图像的斜率为 mg
M+5m
,
根据图像可知斜率为 0.2,又已知 m=0.010 kg,代入解得 M=0.44 kg。
⑥若不平衡摩擦力,则根据牛顿第二定律得 nmg-μ(M+5m-nm)g=(M+5m)a,整理可得 a
=(1+μ)mg
M+5m
·n-μg。图像截距为-μg,故图像不过原点,但仍是直线,故 A 项错误,B 项
正确。斜率为(1+μ)mg
M+5m
,故直线的斜率变大,故 C 项正确。
(27)(经典题,6 分)实验小组成员设计出了如下的实验方案来探究加速度与力、质量的关系,
其实验装置如图所示。已知小车质量 M,砝码盘质量 m0,所使用的打点计时器交流电频率
f=50 H 。其部分实验步骤如下:
A.按图中所示安装好实验装置;
B.调节长木板的倾角,轻推小车后,使小车能沿长木板向下运动;
C.取下细绳和砝码盘,记下砝码盘中砝码的质量 m;
D.将小车置于打点计时器旁,先放开小车,再接通电源,打出一条纸带,由纸带求得小车
的加速度 a;
E.重新挂上细绳和砝码盘,改变砝码盘中砝码的质量,重复 BCD 步骤,求得小车在不同
合力 F 作用下的加速度。
请回答下列问题:
以上实验步骤中,有错误的是 和 。
按上述方案做实验, (选填“要求”或“不要求”)砝码和砝码盘的总质量远小于小
车的质量。
答案:B(2 分) D(2 分) 不要求(2 分)
解析:调节长木板的倾角,轻推小车,使小车沿长木板向下做匀速直线运动,故 B 项错误。
在使用打点计时器时,应先接通电源后释放小车,故 D 项错误。
当小车匀速下滑时有 Mgsin θ=f+(m+m0)g,当取下细绳和砝码盘后,由于重力沿斜面向下
的分力 Mgsin θ和摩擦力 f 不变,因此其合力为(m+m0)g,由此可知该实验中不需要砝码和
砝码盘的总质量远小于小车的质量。
(28)(2018 改编,10 分)在验证牛顿第二定律的实验中,为了减小合力测量的误差,小组成员
设计了如图(a)和图(b)两个实验装置,小车的质量为 M,沙和沙桶的质量为 m。(滑轮质量不
计)
①对这两个实验,下列说法正确的是 。
A.都要用天平测出沙和沙桶的质量
B.为了让小车受到的合力等于绳的拉力,都要将带滑轮的长木板右端垫高,以平衡摩
擦力
C.都要让小车靠近打点计时器,先接通电源,再释放小车,打出一条纸带,同时记录
弹簧测力计的示数
D.为减小误差,实验中都要保证沙和沙桶的质量 m 远小于小车的质量 M
②分别用两个装置进行实验,探究加速度与力的关系,改变沙和沙桶的质量 m,以弹簧测力
计的示数 F 为横坐标,加速度 a 为纵坐标,画出的 a-F 图像应该是下图中的 。
若求得图像的斜率为 k,则甲装置中小车的质量为 ;乙装置中小车的质量
为 。
③当沙和沙桶的总质量较大导致 a 较大时,关于 a-F 图像的说法,正确的是 。(选
填字母代号)
A.图像逐渐偏向纵轴
B.图像逐渐偏向横轴
C.图像仍保持原方向不变
答案:①BC(2 分) ②A(2 分) 2
k(2 分) 1
k(2 分) ③C(2 分)
解析:①装置中有弹簧测力计,所以外力可以通过弹簧测力计读出来,不需要测量沙和沙桶
的质量,更不需要保证沙和沙桶的质量 m 远小于小车的质量 M,故 A 项、D 项均错误。两
个实验中都必须要求细绳的拉力等于小车受到的合力,故需要平衡摩擦力,故 B 项正确。
在使用打点计时器时,都要让小车靠近打点计时器,先接通电源,再释放小车,打出一条纸
带,同时记录弹簧测力计的示数,故 C 项正确。
②由题意及牛顿第二定律(F=Ma)可知,小车的加速度 a 与弹簧测力计的示数 F 的关系应该
是成正比,即小车的 a-F 图像应为一条过原点的倾斜直线,故 A 项正确。
对于甲装置,小车受到的合力等于 2 倍的弹簧测力计示数,故有 2F 甲=Ma,整理得
a= 2
M·F 甲,故小车质量为 M 甲=2
k
;对于乙装置,小车受到的合力等于弹簧测力计示数,故
有 F 乙=Ma,整理得 a= 1
M·F 乙,故小车的质量为 M 乙=1
k
。
③由于图像的斜率为 k= 2
M
或 k= 1
M
,所以增大沙和沙桶的质量,k 不变,则图像仍保持原方
向不变,故 C 项正确。
(29)(2013 全国Ⅰ,7 分)图(a)为测量物块与水平桌面之间动摩擦因数的实验装置示意图。实
验步骤如下:
A.用天平测量物块和遮光片的总质量 M、重物的质量 m;用游标卡尺测量遮光片的宽度 d;
用米尺测量两光电门之间的距离 s;
B.调整轻滑轮,使细线水平;
C.让物块从光电门 A 的左侧由静止释放,用数字毫秒计分别测出遮光片经过光电门 A 和光
电门 B 所用的时间ΔtA 和ΔtB,求出加速度 a;
D.多次重复步骤 C,求 a 的平均值
��
;
E.根据上述实验数据求出动摩擦因数μ。
回答下列问题:
①测量 d 时,某次游标卡尺(主尺的最小分度为 1 mm)的示数如图(b)所示,其读数为
cm。
②物块的加速度 a 可用 d、s、ΔtA 和ΔtB 表示为 a= 。
③动摩擦因数μ可用 M、m、
��
和重力加速度 g 表示为μ= 。
④如果细线没有调整到水平,由此引起的误差属于 。(选填“偶然误差”或“系统
误差”)
答案:①0.960(2 分) ② 1
2s
d
ΔtB 2-
d
ΔtA 2 (2 分) ③ (2 分)
④系统误差(1 分)
解析:①由图(b)所示游标卡尺可知,主尺示数为 0.9 cm,游标尺示数为 12×0.05 mm=0.60
mm=0.060 cm,则游标卡尺示数为 0.9 cm+0.060 cm=0.960 cm。
②物块经过 A 点时的速度 vA= d
ΔtA
,物块经过 B 点时的速度 vB= d
ΔtB
,物块做匀变速直
线运动,由速度位移公式得 2as=v2B-v2A,解得加速度 a= 1
2s
d
ΔtB 2-
d
ΔtA 2 。
③以 M、m 组成的系统为研究对象,由牛顿第二定律得 mg-μMg=(M+m)
��
,解得
。
④由于实验设计造成的误差是不可避免的,属于系统误差;由于实验操作、读数等造成的误
差具有偶然性,属于偶然误差。如果细线没有调整到水平,必然会引起误差,这属于系统误
差。
(30)(经典题,6 分)水平桌面放置带有加速度传感器的总质量为 M 的小车,车的两端由轻质
细绳绕过桌面两端滑轮并在两端各悬挂总质量为 m 的多个钩码,如图(a)所示。实验中,每
次由左侧取下质量为Δm 的钩码并挂至右侧悬线下方,将小车由静止释放,利用传感器测量
小车加速度并逐次记录移动过的钩码质量和相应加速度值,根据多次实验得出的数据,小光
同学作出如图(b)所示的 a-Δm 图像。
①根据上述设计,以下说法正确的是( )
A.由于系统存在摩擦,实验中必须先平衡摩擦力,才能继续进行实验
B.本实验中虽存在摩擦力影响,但无需平衡摩擦力也可以进行实验
C.本实验中必须要求小车质量 M
≫
m
D.本实验中无须要求小车质量 M
≫
m
②利用实验中作出的 a-Δm 图像,可以分析出系统摩擦力大小为 ,加速度 a 与移动
的质量Δm 间存在关系为 。
答案:①BD(2 分) ②2m0g(2 分) a= 2g
M+2m
·Δm- 2m0g
M+2m
(2 分)
解析:①由左侧取下质量为Δm 的钩码并挂至右侧悬线下方时,由牛顿第二定律得(m+Δm)g
-(m-Δm)g-f=(M+2m)a,解得 a= 2g
M+2m
Δm- f
M+2m
,因为摩擦力不变,由此可知 a-Δm
图像是一条倾斜的直线,即可验证当质量不变时,加速度与外力成正比,摩擦力的大小只是
影响截距的大小,不影响实验的结果,故不需要平衡摩擦力,故 A 项错误,B 项正确。选
取系统为研究对象,在整个过程中总质量保持不变,所以不需要 M
≫
m,故 C 项错误,D 项
正确。
②根据 a-Δm 图像可知,当Δm=m0 时,a=0,此时合力为零,即 2m0g-f=0,解得 f=2m0g,
代入 a= 2g
M+2m
Δm- f
M+2m
得 a= 2g
M+2m
Δm- 2m0g
M+2m
。
9.教材原型实验
(31)(2018 改编,9 分)实验小组采用如图(a)所示的装置探究功与速度变化的关系,小车在橡
皮筋的作用下弹出后,沿木板滑行。
实验中先后用同样的橡皮筋 1 条、2 条、3 条……合并起来挂在小车的前端进行多次实验,
每次都要把小车拉到同一位置再释放。把第 1 次只挂 1 条橡皮筋时橡皮筋对小车做的功记为
W1,第二次挂 2 条橡皮筋时橡皮筋对小车做的功为 2W1……橡皮筋对小车做功后而使小车
获得的速度可由打点计时器打出的纸带测出,打点计时器所用电源频率为 50 H 。
①为了消除小车运动过程中所受摩擦力的影响,调整时应将木板 (选填“左”或
“右”)端适当垫高,直到小车在无橡皮筋拉动下,打点计时器能打出等间距点的纸带。这
样做的目的是 (选填选项前的字母)。
A.使释放小车后,小车能匀加速下滑
B.平衡小车下滑时受到的摩擦力
C.使得橡皮筋做的功等于合力对小车做的功
D.使得橡皮筋松弛后小车做匀速运动
②实验中,小组成员试打出一段纸带如图(b)所示,相邻两计时点距离依次为 AB=3.50 cm、
BC=3.80 cm、CD=DE=EF=FG=GH=4.00 cm,则匀速运动的速度 v= m/s。
③正式实验后,实验中使用橡皮筋 1 6 条,每次实验增加一条,实验中 W、v、v2 的数据已
填在表格中,试在图(c)中作出相应图像。
W v/(m·s-1) v2/(m2·s-2)
0 0 0
1.00 0.80 0.64
2.00 1.10 1.21
3.00 1.28 1.64
4.00 1.53 2.34
5.00 1.76 3.10
6.00 1.89 3.57
根据画出的橡皮筋对小车做功 W 与小车匀速运动速度 v、v2 的关系图线,由图线形状猜想,
W 与 v 的关系为 。
答案:①左(1 分) BCD(2 分) ②2.00(2 分) ③见解析(2 分) 合力做的功与速度的平方成
正比(W∝v2)(2 分)
解析:①平衡摩擦力时,应将左端垫高形成斜面,使重力的下滑分力与摩擦力平衡,使小车
在无橡皮筋拉动下,打点计时器能打出等间距点的纸带。
释放小车后,小车在橡皮筋的弹力作用下做加速运动,由于弹力是变力,因此在弹力作用下
不可能做匀加速运动,故 A 项错误,B 项正确。由于小车受到的摩擦力与小车所受重力的
下滑分力大小相等,在不施加拉力时,小车在斜面上受到的合力为零,小车可以在橡皮筋松
弛后做匀速直线运动,橡皮筋与小车相互作用时,小车所受到的合力等于橡皮筋的拉力,橡
皮筋对小车做的功等于合力对小车做的功,故 C 项、D 项均正确。
②由题给条件可知,小车自 C 点开始匀速运动,则匀速运动的速度 v=xCD
T
=4.00×10-2
0.02
m/s
=2.00 m/s。
③根据描点法作出图像,如图所示。W-v2 的图像为过原点的直线,因此根据数学知识可知,
在误差允许范围内,合力做的功与速度的平方成正比,即 W∝v2。
(32)(2017 江苏单 ,8 分)利用如图(a)所示的实验装置探究恒力做功与物体动能变化的关系。
小车的质量为 M=200.0 g,钩码的质量为 m=10.0 g,打点计时器的电源为 50 H 的交流电
源。
①挂钩码前,为了消除摩擦力的影响,应调节木板右侧的高度,直至向左轻推小车观察
到 。
②挂上钩码,按实验要求打出的一条纸带如图(b)所示。选择某一点为 O,依次每隔 4 个计
时点取一个计数点,用刻度尺量出相邻计数点间的距离Δx,记录在纸带上。计算打出各计
数点时小车的速度 v,其中打出计数点“1”时小车的速度 v1= m/s。
③将钩码的重力视为小车受到的拉力,取 g=9.80 m/s,利用 W=mgΔx 算出拉力对小车做的
功 W。利用 Ek=1
2Mv2 算出小车动能,并求出动能的变化量ΔEk。计算结果见下表。
W/×10-3 J 2.45 2.92 3.35 3.81 4.26
ΔEk/×10-3 J 2.31 2.73 3.12 3.61 4.00
请根据表中的数据,在图(c)中作出ΔEk-W 图像。
④实验结果表明,ΔEk 总是略小于 W。某同学猜想是由于小车所受拉力小于钩码重力。用题
中小车和钩码质量的数据可算出小车受到的实际拉力 F= N。
答案:①小车做匀速运动(2 分) ②0.228(2 分) ③见解析(2 分) ④0.093(2 分)
解析:①挂钩码前,为了消除摩擦力的影响,应调节木板右侧的高度,直至向左轻推小车观
察到小车做匀速运动,摩擦力达到平衡。
②根据匀变速直线运动规律,某段时间中间时刻的瞬时速度等于该段时间的平均速度可知,
计数点 1 的速度 v1=x02
2T
=(2.06+2.50)×10-2
0.2
m/s=0.228 m/s。
③根据表格中的数据作出ΔEk-W 图像如图所示。
④对整体分析,根据牛顿第二定律得 a= mg
M+m
,则小车受到的实际拉力 F=Ma= Mmg
M+m
,代
入数据解得 F=0.093 N。
10.实验创新与改进
(33)(经典题,6 分)某学习小组利用拉力传感器和气垫导轨、光电门探究“动能定理”。图
(a)为该学习小组设计的实验装置。他们在气垫导轨上安装了一个光电门 B,滑块上固定一遮
光条,滑块用细线绕过气垫导轨左端的定滑轮与力传感器相连,传感器下方悬挂钩码,每次
滑块都从 A 处由静止释放。
①该同学用游标卡尺测量遮光条的宽度 d,如图(b)所示,则 d= mm。
②下列不必要的一项实验要求是 。(选填选项前的字母)
A.应使滑块质量远大于钩码和力传感器的总质量
B.应使 A 位置与光电门间的距离适当大些
C.应将气垫导轨调节水平
D.应使细线与气垫导轨平行
③实验时保持滑块的质量 M 和 A、B 间的距离 L 不变,改变钩码质量 m,测出对应的力传
感器的示数 F 和遮光条通过光电门的时间 t,通过描点作出线性图像,研究滑块动能变化与
合外力对它所做功的关系,处理数据时作出如下图像正确的是 。
A.作出“t-F 图像” B.作出“t2-F 图像”
C.作出“t2-1
F
图像” D.作出“1
t- F图像”
答案:①2.25(2 分) ②A(2 分) ③C(2 分)
解析:①游标卡尺读数结果等于固定刻度读数加上可动刻度读数,不需要估读。由题图(b)
知第 5 条刻度线与主尺对齐,故 d=2 mm+5×0.05 mm=2.25 mm。
②拉力是直接通过传感器测量的,故与小车质量和钩码质量大小无关,故 A 项不必要。使 A
位置与光电门间的距离适当大些,有利于减小误差,故 B 项是必要的。应将气垫导轨调节
水平,保持细线方向与气垫导轨平行,这样拉力才等于合力,故 C 项、D 项均是必要的。
③滑块从 A 位置到光电门间做匀加速直线运动,故有 v2=2aL,滑块到达光电门的速度为 v
=d
t
,根据牛顿第二定律得 a=F
M
,代入整理得 t2=Md2
2L ·1
F
,可见研究滑块的加速度与力的关
系,处理数据时应作出“t2-1
F
图像”,故 C 项正确。
(34)(经典题,6 分)小组成员用如图所示的装置探究功与速度变化的关系。
A.小物块在橡皮筋的作用下弹出,沿水平桌面滑行,之后平抛落至水平地面上,落点记为
M1;
B.在钉子上分别套上 2 条、3 条、4 条……同样的橡皮筋,使每次橡皮筋拉伸的长度都保
持一致,重复步骤 A,小物块落点分别记为 M2、M3、M4…;
C.测量相关数据,进行数据处理。
①为求出小物块抛出时的动能,需要测量下列物理量中的 (填下列选项前的字母)。
A.小物块的质量 m
B.橡皮筋的原长 x
C.橡皮筋的伸长量Δx
D.桌面到地面的高度 h
E.小物块抛出点到落地点的水平距离 L
②将几次实验中橡皮筋对小物块做功分别记为 W1、W2、W3…,小物块抛出点到落地点的水
平距离分别记为 L1、L2、L3…。若功与速度的平方成正比,则应以 W 为纵坐标、以 为
横坐标作图,才能得到一条直线。
③由于小物块与桌面之间的摩擦力不能忽略,则由此引起的误差属于 (选填“偶然
误差”或“系统误差”)。
答案:①ADE(2 分) ②L2(2 分) ③系统误差(2 分)
解析:①动能跟质量和速度有关,所以需要测量出小物块的质量,然后测量小物块的速度。
小物块抛出后做平抛运动,在水平方向上做匀速直线运动,v0=L
t
,L 表示水平方向上的位
移,即小物块抛出点到落地点的水平距离,在竖直方向上做自由落体运动,所以有 h=1
2gt2,
故欲知时间需要测量下落的高度,故 A 项、D 项、E 项均正确。
②根据 h=1
2gt2,v0=L
t
,可得 v20= g
2hL2,因为功与速度的平方成正比,所以功与 L2 成正比,
故应以 W 为纵坐标、L2 为横坐标作图,才能得到一条直线。
③由于实验装置存在一些不能克服的问题而导致的误差叫做系统误差,故由于小物块与桌面
之间的摩擦力不能忽略而引起的误差属于系统误差。
(35)(经典题,8 分)某同学用图(a)所示装置来“探究小车动能变化与合外力对它所做功的关
系”。图中 A 为小车,连接在小车后面的纸带穿过打点计时器 B 的限位孔,它们均置于水
平放置的一端带有定滑轮的足够长的木板上,C 为弹簧测力计,不计绳与滑轮的摩擦。实验
时,先接通电源再松开小车,打点计时器在纸带上打下一系列点。在一条比较理想的纸带上,
从点迹清楚的某点开始记为 0 点,再顺次选取 5 个点,分别测量这 5 个点到 0 点的距离 L,
并计算出各点速度平方与 0 点速度平方之差Δv2(Δv2=v2-v20),填入下表。
点迹 L/cm Δv2/(m2·s-2)
0 / /
1 1.60 0.04
2 3.60 0.09
3 6.00 0.15
4 7.00 0.18
5 9.20 0.23
①请以Δv2 为纵坐标,以 L 为横坐标在方格纸中作出Δv2-L 图像。
②若测出小车质量为 0.2 kg,结合图像可求得小车所受合力的大小为 N。
③若小组成员通过计算发现小车所受合力小于测力计读数,明显超出实验误差的正常范围。
你 认 为 主 要 原 因 是 , 实 验 操 作 中 改 进 的 措 施
是
。
答案:①见解析(2 分) ②0.25(2 分) ③未平衡摩擦力(2 分) 把木板不带定滑轮的那一端适
当垫高,以平衡摩擦力(2 分)
解析:①利用描点作图法即可得出Δv2-L 图像,如图所示。
②由动能定理可得 W=FL=1
2mv2-1
2mv20=1
2m(v2-v20),整理得Δv2=2F
m L,结合①图可知Δv2-L
图像的斜率为 k=2F
m
=2.5,代入小车质量 m=0.2 kg,解得 F=0.25 N。
③这个实验的装置中,把绳子的拉力看成小车受到的合力,由于小车受到桌面的摩擦力,故
会使合力小于绳子的拉力。故原因是未平衡摩擦力(或小车受到摩擦阻力的影响)。措施是把
木板不带定滑轮的那一端适当垫高,以平衡摩擦力。
(36)(经典题,10 分)实验小组成员设置如图(a)所示实验装置结合数字化信息系统来探究“外
力做功与小车动能变化的关系”。实验时将小车拉到水平轨道的 O 位置由静止释放,在小
车从 O 位置运动到 A 位置过程中,经计算机处理得到了弹簧弹力与小车位移的关系图线如
图(b)所示,还得到了小车在 A 位置的速度大小 vA;另外用电子秤测得小车(含位移传感器发
射器)的总质量为 m。回答下列问题。
①由图(b)可知,图(a)中 A 位置到力传感器的距离 (选填“小于”“等于”或“大
于”)弹簧原长。
②小车从 O 位置运动到 A 位置过程中弹簧对小车所做的功 W= ,小车的动
能改变量ΔEk= 。(用 m、vA、FA、F0、xA 中各相关物理量表示)
③若将弹簧从小车上卸下,给小车一初速度 v0,让小车从轨道右端向左端滑动,利用位移
传感器和计算机得到小车的速度随时间变化的图线如图(c)所示,则小车所受轨道摩擦力的
大小= 。(用 m、v0、tm 中各相关物理量表示)
④综合步骤②、③,该实验所要探究的“外力做功与小车动能变化的关系”表达式
是 。
(用 m、vA、FA、F0、xA、v0、tm 中各相关物理量表示)
答案:①大于(2 分) ②1
2(F0+FA)xA(2 分) 1
2mv2A(2 分) ③mv0
tm
(2 分)
④1
2(FA+F0)xA-mv0
tm
xA=1
2mv2A(2 分)
解析:①由图(b)可知,力传感器的示数一直减小,所以图(a)中 A 位置到力传感器的距离大
于弹簧原长。
②由图像得小车从 O 位置运动到 A 位置过程中弹簧对小车所做的功 W=1
2(F0+FA)xA,小车
的动能改变量ΔEk=1
2mv2A。
③由图线可知,小车的加速度为 a=v0
tm
,则根据牛顿第二定律 F=ma 可知,小车所受轨道摩
擦力的大小 f=mv0
tm
。
④该实验所要探究的“外力做功与小车动能变化的关系”表达式是 WF-Wf=1
2mv2A,即1
2(FA
+F0)xA-mv0
tm
xA=1
2mv2A。
11.教材原型实验
(37)(2016 北京理综,12 分)利用图(a)所示装置做“验证机械能守恒定律”实验。
①为验证机械能是否守恒,需要比较重物下落过程中任意两点间的( )
A.动能变化量与势能变化量
B.速度变化量和势能变化量
C.速度变化量和高度变化量
②除带夹子的重物、纸带、铁架台(含铁夹)、电磁打点计时器、导线及开关外,在下列器材
中,还必须使用的两种器材是( )
A.交流电源
B.刻度尺
C.天平(含砝码)
③实验中,先接通电源,再释放重物,得到图(b)所示的一条纸带。在纸带上选取三个连续
打出的点 A、B、C,测得它们到起始点 O 的距离分别为 hA、hB、hC。已知当地重力加速度
为 g,打点计时器打点的周期为 T。设重物的质量为 m。从打 O 点到打 B 点的过程中,重物
的重力势能变化量ΔEp= ,动能变化量ΔEk= 。
④大多数学生的实验结果显示,重力势能的减少量大于动能的增加量,原因是( )
A.利用公式 v=gt 计算重物速度
B.利用公式 v= 2gh计算重物速度
C.存在空气阻力和摩擦力阻力的影响
D.没有采用多次实验取平均值的方法
⑤某同学想用下述方法研究机械能是否守恒:在纸带上选取多个计数点,测量它们到起始点
O 的距离 h,计算对应计数点的重物速度 v,描绘 v2-h 图像,并做如下判断:若图像是一条
过原点的直线,则重物下落过程中机械能守恒。请你分析论证该同学的判断是否正确?
答案:①A(2 分) ②AB(2 分) ③mghB(2 分) 1
2m
hC-hA
2T 2(2 分) ④C(2 分) ⑤不正确,
详见解析(2 分)
解析:①根据机械能守恒定律得 mgh=1
2mv2,故需要比较重物下落过程中任意两点间的的动
能变化量与势能变化量,故 A 项正确。
②电磁打点计时器必须接交流电源才能正常工作,故需要交流电源。实验过程中,还需要测
量纸带上两点之间的距离,故还需要刻度尺。验证公式为 mgh=1
2mv2,质量 m 可以约去,
故不需要天平。本题选必须使用的两种器材,故选 AB。
③重力势能改变量为ΔEp=mghB,动能改变量为ΔEk=1
2mv2B,根据匀变速直线运动规律可得
vB=hC-hA
2T
,解得ΔEk=1
2m
hC-hA
2T
2
。
④实验结果一般是重力势能的减少量大于动能的增加量,原因是物体在下落过程中克服空气
阻力及打点计时器与纸带间摩擦力做功,故 C 项正确。
⑤根据机械能守恒定律得 mgh=1
2mv2,解得 v2=2gh,可见,v2-h 图像就是一条过原点且斜
率为 2g 的直线,故该同学的判断不正确,要通过 v2-h 图像来验证机械能守恒,还必须满足
图像斜率接近 2g。
38.(2016 全国Ⅰ,5 分)某同学用图(a)所示的实验装置验证机械能守恒定律,其中打点计时器
的电源为交流电源,可以使用的频率有 20 H 、30 H 和 40 H ,打出纸带的一部分如图(b)
所示。
该同学在实验中没有记录交流电的频率 f,需要用实验数据和其他条件进行推算。
①若从打出的纸带可判定重物匀加速下落,利用 f 和图(b)中给出的物理量可以写出:在打点
计时器打出 B 点时,重物下落的速度大小为 ,打出 C 点时重物下落的速度大小
为 ,重物下落的加速度的大小为 。
②已测得 s1=8.89 cm,s2=9.50 cm,s3=10.10 cm;当地重力加速度大小为 9.80 m/s2,实验
中重物受到的平均阻力大小约为其重力的 1 。由此推算出 f 为 H 。
答案:①(s1+s2)f
2
(1 分) (s2+s3)f
2
(1 分) (s3-s1)f 2
2
(1 分) ②40(2 分)
解析:①根据某段时间内的平均速度等于中间时刻的瞬时速度可得 vB=s1+s2
2T
=(s1+s2)f
2
,
vC=s2+s3
2T
=(s2+s3)f
2
,由速度公式 vC=vB+at 可得 a=(s3-s1)f 2
2
。
②根据牛顿第二定律可得 mg-0.01mg=ma,解得 a=0.99g,结合①解出的加速度表达式 a
=(s3-s1)f2
2
,代入数据解得 f≈40 H 。
12.实验创新与改进
(39)(2016 江苏单 ,10 分)某同学用如图(a)所示的装置验证机械能守恒定律。一根细线系住
钢球,悬挂在铁架台上,钢球静止于 A 点,光电门固定在 A 的正下方。在钢球底部竖直地
粘住一片宽度为 d 的遮光条。将钢球拉至不同位置由静止释放,遮光条经过光电门的挡光时
间 t 可由计时器测出,取 v=d
t
作为钢球经过 A 点时的速度。记录钢球每次下落的高度 h 和
计时器示数t,计算并比较钢球在释放点和A点之间的势能变化大小ΔEp与动能变化大小ΔEk,
就能验证机械能是否守恒。
①用ΔEp=mgh 计算钢球重力势能变化的大小,式中钢球下落高度 h 应测量释放时的钢球球
心到 之间的竖直距离。
A.钢球在 A 点时的顶端
B.钢球在 A 点时的球心
C.钢球在 A 点时的底端
②用ΔEk=1
2mv2 计算钢球动能变化的大小,用刻度尺测量遮光条宽度,示数如图(b)所示,其
读数为 cm。某次测量中,计时器的示数为 0.010 0 s,则钢球的速度为 v=
m/s。
③下表为该同学的实验结果:
ΔEp(×10-2 J) 4.892 9.786 14.690 19.590 29.380
ΔEk(×10-2 J) 5.04 10.1 15.1 20.0 29.8
他发现表中的ΔEp 与ΔEk 之间存在差异,认为这是由于空气阻力造成的。你是否同意他的观
点?请说明理由。
④请你提出一条减小上述差异的改进建议。
答案:①B(2 分) ②1.50(2 分) 1.50(2 分) ③不同意,因为空气阻力会造成ΔEk 小于ΔEp,
但表中ΔEk 大于ΔEp,所以误差不是空气阻力造成的。(2 分) ④分别测出光电门和球心到悬
点的长度为 L 和 l,由ΔEk=1
2mv2 计算动能的增加量时,代入钢球的速度 v′=l
Lv(2 分)
解析:①钢球下落的高度 h 是初末位置球心之间的高度差,故 B 项正确。
②刻度尺读数时需估读一位,由题图可知,读数为 1.50 cm。某次测量中,计时器的示数为
0.010 0 s,则钢球的速度为 v=d
t
=1.50 m/s。
③不同意,从表中数据可知,钢球动能的增加量大于钢球的重力势能减小量,若误差是由空
气阻力造成的,则ΔEk 要小于ΔEp,故误差不是由空气阻力造成的。
④根据 v=d
t
计算的速度是遮光条的速度,略大于钢球的速度,导致由ΔEk=1
2mv2 计算动能
的增加量时计算结果偏大,造成误差。设钢球速度为 v′,则根据角速度与速度关系可知v′
v
=
l
L
,解得钢球的速度为 v′=l
Lv。所以为了减小实验误差,建议分别测出光电门和球心到悬点
的长度为 L 和 l,由ΔEk=1
2mv2 计算动能的增加量时,代入钢球的速度 v′=l
Lv。
(40)(经典题,6 分)利用气垫导轨验证机械能守恒定律,实验装置如图(a)所示,水平桌面上
固定一倾斜的气垫导轨;导轨上 A 点处有一带长方形遮光条的滑块,其总质量为 M,左端
由跨过轻质光滑定滑轮的细绳与一质量为 m 的小球相连;遮光条两条长边与导轨垂直;导
轨上 B 点有一光电门,可以测量遮光条经过光电门时的挡光时间 t,用 d 表示 A 点到光电门
B 处的距离,b 表示遮光条的宽度,将遮光条通过光电门的平均速度看成滑块通过 B 点时的
瞬时速度,实验时滑块在 A 处由静止开始运动。
①某次实验测得倾角θ=30°,重力加速度用 g 表示,滑块从 A 处到达 B 处时 m 和 M 组成的
系统动能增加量可表示为ΔEk= 。系统的重力势能减少量可表示为ΔEp= 。
在误差允许的范围内,若ΔEk=ΔEp 则认为系统的机械能守恒。
②在上次实验中,某同学改变 A、B 间的距离,作出的 v2-d 图像如图(b)所示,并测得 M=m,
则重力加速度 g= m/s2。
答案:① (M+m)b2
2t2 (2 分) m-M
2 gd(2 分) ② 9.6(2 分)
解析:①滑块从 A 处到达 B 处时 m 和 M 组成的系统的动能的增加量可表示为ΔEk=1
2(M+
m)v2=(M+m)b2
2t2
,系统的重力势能的减少量可表示为ΔEp=mgd-Mgdsin θ= m-M
2 gd。
②根据机械能守恒得 m-M
2 gd=1
2(M+m)v2,解得 v2=2 m-M
2 gd
M+m
,可知 v2-d 图像的斜率
为 k=2 m-M
2 g
M+m
=2.4
0.5
,代入 M=m,解得 g=9.6 m/s2。
(41)(经典题,10 分)用图(a)所示实验装置验证 m1、m2 组成的系统机械能守恒。m2 从高处由
静止开始下落,m1 上拖着的纸带打出一系列的点,对纸带上的点迹进行测量,即可验证机
械能守恒定律。图(b)给出的是实验中获取的一条纸带:0 是打下的第一个点,每相邻两计数
点间还有 4 个点(图中未标出),计数点间的距离如图所示。已知 m1=50.0 g、m2=150.0 g,
打点计时器每隔 0.02 s 打一个点,则(取 g=9.80 m/s2,结果均保留三位有效数字)
①在纸带上打下计数点 5 时的速度 v= m/s。
②在打点 0 5 过程中系统动能的增加量ΔEk= J,系统势能的减少量ΔEp= J,
由此得出的结论是
。
③若某同学作出1
2 v2-h 图像如图(c)所示,则当地的实际重力加速度 g= m/s2。
答案:①2.40(2 分) ②0.576(2 分) 0.588(2 分) 在误差允许的范围内,m1、m2 组成的系统
机械能守恒(2 分) ③9.70(2 分)
解析:①每相邻两计数点间还有 4 个点,则 T=0.1 s,根据匀变速直线运动过程中平均速度
等于该段过程中间时刻瞬时速度可得 v=x46
2T
,代入数据可得 v=2.40 m/s。
②因为系统动能的增加量为ΔEk=1
2(m1+m2)v2,所以ΔEk=0.576 J,系统重力势能减少量为
ΔEp=(m2-m1)gx05,代入数据可得ΔEp=0.588 J,在误差允许的范围内,m1、m2 组成的系统
机械能守恒。
③因为1
2(m1+m2)v2=(m2-m1)gh,故可解得 1
2v2=g
2h,所以图像的斜率 k=g
2
,解得 g=9.70 m/s2。
(42)(2016 四川理综,6 分)用如图所示的装置测量弹簧的弹性势能。将弹簧放置在水平气垫
导轨上,左端固定,右端在 O 点;在 O 点右侧的 B、C 位置各安装一个光电门,计时器(图
中未画出)与两个光电门相连。先用米尺测得 B、C 两点间距离 s,再用带有遮光条的滑块压
缩弹簧到某位置 A,静止释放,计时器显示遮光条从 B 到 C 所用的时间 t,用米尺测量 A、
O 之间的距离 x。
①计算滑块离开弹簧时速度大小的表达式是 。
②为求出弹簧的弹性势能,还需要测量 。
A.弹簧原长
B.当地重力加速度
C.滑块(含遮光条)的质量
③增大 A、O 之间的距离 x,计时器显示时间 t 将 。
A.增大 B.减小 C.不变
答案:①v=s
t(2 分) ②C(2 分) ③B(2 分)
解析:①滑块离开弹簧后的运动可视为匀速运动,故可以用 BC 段的平均速度表示离开时的
速度,则有 v=s
t
。
②根据机械能守恒定律可知,弹簧弹性势能的减少量等于物体动能的增加量,即ΔEp=ΔEk
=1
2mv2,可见还需要测量滑块(含遮光条)的质量,故 C 项正确。
③增大 AO 间的距离时,滑块被弹出后的速度将增大,故通过两光电门的时间将减小,故 B
项正确。
13.教材原型实验
(43)(经典题,13 分)如图(a),用“碰撞实验器”可以验证动量守恒定律,即研究两个小球
在轨道水平部分碰撞前后的动量关系。
①实验中,直接测定小球碰撞前后的速度是不容易的。但是,可以通过仅测量 (选
填选项前的字母),间接地解决这个问题。
A.小球开始释放高度 h
B.小球抛出点距地面的高度 H
C.小球做平抛运动的水平射程
②图(a)中 O 点是小球抛出点在地面上的竖直投影。实验时,先让入射球 m1 多次从斜轨上 S
位置静止释放,找到其平均落地点的位置 P,测量平抛射程 OP。然后,把被碰小球 m2 静置
于轨道的水平部分,再将入射球 m1 从斜轨上 S 位置静止释放,与小球 m2 相碰,并多次重复。
接下来要完成的必要步骤依次是 。
A.用天平测量两个小球的质量 m1、m2
B.测量小球 m1 开始释放高度 h
C.测量抛出点距地面的高度 H
D.分别找到 m1、m2 相碰后平均落地点的位置 M、N
E.测量平抛射程 OM,ON
③若两球相碰前后的动量守恒,其表达式可表示为
( 用 ② 中 测 量 的 量 表 示 ) ; 若 碰 撞 是 弹 性 碰 撞 , 那 么 还 应 满 足 的 表 达 式 为
(用②中测量的量表示)。
④经测定,m1=45.0 g,m2=7.5 g,小球落地点的平均位置距 O 点的距离如图(b)所示。碰撞
前、后 m1 的动量分别为 p1 与 p1′,则 p1:p1′= ∶11;若碰撞结束时 m2 的动量为
p2′,则 p1′∶p2′=11∶ 。
实验结果说明,碰撞前、后总动量的比值 p1
p1′+p2′
为 。
⑤有同学认为,在上述实验中仅更换两个小球的材质,其他条件不变,可以使被碰小球做平
抛运动的射程增大。请你用④中已知的数据,分析和计算出被碰小球 m2 平抛运动射程 ON
的最大值为 cm。
答案:①C(2 分) ②ADE 或 DEA(2 分) ③m1·OM+m2·ON=m1·OP(2 分) m1·OM2+m2·ON2
=m1·OP2(2 分) ④14(1 分) 2.9(1 分) 1.01(1 分) ⑤76.8(2 分)
解析:①验证动量守恒定律实验中,碰撞前后的速度测量是实验误差的主要 ,采用本题中
的实验装置可避免速度的测量。根据平抛运动规律,小球下落高度相等则下落时间相等,因
此可用平抛运动的水平射程间接代替水平方向的速度,故 C 项正确。
②实验时,先让入射球 m1 多次从斜轨上 S 位置静止释放,找到其平均落地点的位置 P,测
量平抛射程 OP,然后把被碰小球 m2 静置于轨道的水平部分,再将入射球 m1 从斜轨上 S 位
置静止释放,与小球 m2 相碰,并多次重复,测量平均落点的位置,找到平抛运动的水平位
移。因此步骤中 D、E 是必须的,而且 D 要在 E 之前,至于用天平测量质量先后均可以,
故答案是 ADE 或 DEA。
③设落地时间为 t,则 v0=OP
t
,v1=OM
t
,v2=ON
t
,因此可用平抛运动的水平射程 OP、OM、
ON 间接代替水平方向的速度 v0、v1、v2。若两球相碰前后的动量守恒,则 m1v0=m1v1+m2v2,
即 m1·OP=m1·OM+m2·ON 成立,若碰撞是弹性碰撞,则有动能守恒 1
2mv20=1
2m1v21+1
2m2v22,
即 m1·OP2=m1·OM2+m2·ON2 成立。
④根据题意,碰撞前小球 m1 的动量为 p1=m1·OP
t
,碰撞后小球 m1 的动量为 p′1=m1·OM
t
,小
球 m2 的动量为 p′2=m2·ON
t
,则p1
p′1
=OP
OM
=44.8
35.2
=14
11
;p′1
p′2
=m1·OM
m2·ON
=45.0×35.2
7.5×55.68
=11
2.9
; p1
p′1+p′2
= 14
11+2.9
=1.01。
⑤发生弹性碰撞时,被碰小球获得的速度最大,碰撞过程中系统机械能守恒,动量守恒,故
有 1
2m1v20=1
2m1v21+1
2m2v22,m1v0=m1v1+m2v2,联立解得 v2= 2m1
m1+m2
v0,用平抛运动水平射程
代替水平方向的速度,可得最大射程为 sm= 2m1
m1+m2
·OP= 2×45
45+7.5
×44.8 cm=76.8 cm。
(44)(经典题,6 分)①利用气垫导轨通过闪光照相进行“探究碰撞中的不变量”这一实验。
实验要求研究两滑块碰撞时动能损失很小和很大等各种情况,若要求碰撞时动能损失最大应
选图(a)中的 ,若要求碰撞动能损失最小则应选图(a)中的 。(选填“甲”或
“乙”)(甲图两滑块分别装有弹性圈,乙图两滑块分别装有撞针和橡皮泥)
②某次实验时,碰撞前 B 滑块静止,A 滑块匀速向 B 滑块运动并发生碰撞,利用闪光照相
的方法连续 4 次拍摄得到的闪光照片如图(b)所示。已知相邻两次闪光的时间间隔为 T,在这
4 次闪光的过程中,A、B 两滑块均在 0 80 cm 范围内,且第 1 次闪光时,滑块 A 恰好位于 x
=10 cm 处。若 A、B 两滑块的碰撞时间及闪光持续的时间极短,均可忽略不计,则可知碰
撞发生在第 1 次闪光后的 时刻,A、B 两滑块质量比 mA∶mB= 。
答案:①乙(1 分) 甲(1 分) ②2.5T(2 分) 2∶1(2 分)
解析:①若要求碰撞时动能损失最大,则需两物体碰撞后结合在一起(完全非弹性碰撞),故
应选题图(a)中的乙;若要求碰撞动能损失最小,则应使两物体发生完全弹性碰撞,即选题
图(a)中的甲。
②由题图(b)可知,第 1 次闪光时,滑块 A 恰好位于 x=10 cm 处;第二次 A 在 x=30 cm 处;
第三次 A 在 x=50 cm 处;碰撞在 x=60 cm 处,从第三次闪光到碰撞的时间为T
2
,则可知碰
撞发生在第 1 次闪光后的 2.5T 时刻。若设碰前 A 的速度为 v,根据公式 v=s
t
,由闪光照片
可得,v=20 cm
T
,在发生碰撞后的T
2
时间内,A 向右运动的距离为 5 cm,B 向右运动的距离
为 10 cm,则碰后 A 的速度为v
2
,B 的速度为 v,根据动量守恒定律可得 mAv=mA·v
2
+mBv,
解得mA
mB
=2
1
。
14.实验创新与改进
(45)(2018 改编,8 分)①为验证碰撞中的动量守恒和检验两个小球的碰撞是否为弹性碰撞,
甲同学选用如图(a)所示的装置,在水平槽末端与水平地面间放置了一个斜面,斜面的顶点
与水平槽等高且无缝连接,使小球 1 从斜槽上 A 点由静止滚下,重复实验多次,得到两球
落在斜面上的平均落点如图中 D、E、F 点,各点到 B 点的距离分别为 LD、LE、LF。根据他
的实验,只要满足关系式
, 则 说 明 碰 撞 中 动 量 是 守 恒 的 ; 只 要 再 满 足 关 系
式 ,则说明两小球的碰撞是弹性碰撞(均用所测物理量的字母表
示)。
②乙同学也用上述两球进行实验,但将实验装置改成如图(b)所示。将白纸、复写纸固定在
竖直放置的木条上,用来记录实验中小球 1、小球 2 与木条的撞击点。实验时先将木条竖直
立在轨道末端右侧并与轨道接触,让入射小球 1 从斜轨上起始位置由静止释放,撞击点为 B′;
然后将木条平移到图中所示位置,入射小球 1 从斜轨上起始位置由静止释放,确定其撞击点
P;再将入射小球 1 从斜轨上起始位置由静止释放,与小球 2 相撞,撞击点为 M 和 N,测得
B′与 N、P、M 各点的高度差分别为 h1、h2、h3。只要满足关系式 ,
则说明碰撞中动量是守恒的;只要再满足关系式 ,则说明两小球
的碰撞是弹性碰撞(用所测物理量的字母表示)。
答案:①m1 LE=m1 LD+m2 LF(2 分) m1LE=m1LD+m2LF(2 分) ② m1
h2
= m1
h3
+ m2
h1
(2 分)
m1
h2
=m1
h3
+m2
h1
(2 分)
解析:①碰撞前,m1 落在斜面上的 E 点,设其水平初速度为 v1,小球 m1 和 m2 发生碰撞后,
m1 的落点在 D 点,设其水平初速度为 v1′,m2 的落点是 F 点,设其水平初速度为 v2,设斜
面 BC 与水平面的夹角为α。
由平抛运动规律得 LEsin α=1
2gt2,LEcos α=v1t,解得 v1= gLEcos2α
2sin α
,同理 v1′= gLDcos2α
2sin α
,
v2= gLFcos2α
2sin α
,可见速度正比于 L,故只需验证 m1 LE=m1 LD+m2 LF即可,若为弹性
碰撞,则满足机械能守恒,即 1
2m1v21=1
2m1v′21+1
2m2v22,代入速度表达式,化简可得 m1LE=m1LD
+m2LF。
②小球做平抛运动,在竖直方向上 h=1
2gt2,平抛运动时间 t= 2h
g
,设轨道末端到木条的
水平位置为 x,小球做平抛运动的初速度 v1=
x
2h2
g
,v1′= x
2h3
g
,v2′= x
2h1
g
,如果碰撞过
程动量守恒,则 m1v1=m1v1′+m2v2′,将 v1、v1′、v2′代入,可得 m1
h2
= m1
h3
+ m2
h1
。
若为弹性碰撞,则满足动能守恒,即 1
2m1v21=1
2m1v1′2+1
2m2v2′2,代入速度表达式,化简可得m1
h2
=m1
h3
+m2
h1
。
(46)(2014 全国Ⅱ,10 分)利用图(a)所示的装置验证动量守恒定律。在图(a)中,气垫导轨上有
A、B 两个滑块,滑块 A 右侧带有一弹簧片,左侧与打点计时器(图中未画出)的纸带相连;
滑块 B 左侧也带有一弹簧片,上面固定一遮光条,光电计时器(未完全画出)可以记录遮光条
通过光电门的时间。
实验测得滑块A 的质量m1=0.310 kg,滑块B 的质量m2=0.108 kg,遮光条的宽度d=1.00 cm;
打点计时器所用的交流电的频率为 f=50 H 。
将光电门固定在滑块 B 的右侧,启动打点计时器,给滑块 A 一向右的初速度,使它与 B 相
碰;碰后光电计时器显示的时间为ΔtB=3.500 ms,碰撞前后打出的纸带如图(b)所示。
若实验允许的相对误差绝对值(|碰撞前后总动量之差
碰前总动量 |×100 )最大为 5 ,本实验是否在误
差范围内验证了动量守恒定律?写出运算过程。
答案:在误差范围内验证了动量守恒定律,证明过程见解析。(10 分)
解析:打点计时器的打点时间间隔
t=1
f
= 1
50 s=0.02 s(1 分)
由题图(b)所示纸带可知,碰撞前 A 的速度
vA=xA
t
=0.0400
0.02 m/s=2 m/s(1 分)
碰撞后 A 的速度 vA′=0.0194
0.02 m/s=0.97 m/s(1 分)
碰撞后 B 的速度为
vB′= d
ΔtB
= 0.0100
3.5×10-3 m/s≈2.86 m/s(1 分)
碰撞前后系统总动量分别为
p=m1vA=0.62 kg· m/s(2 分)
p′=m1vA′+m2vB′≈0.61 kg· m/s(2 分)
相对误差为|p-p′
p |×100 =|0.62-0.61
0.62 |×100 ≈1.6 <5 ,即在误差范围内验证了动量
守恒定律(2 分)
(47)(经典题,6 分)小组成员设计了如图所示的装置用来验证动量守恒,弹性球 1 用细线悬
挂于 O 点,O 点下方桌子的边沿有一竖直立柱。实验时,调节悬点,使弹性球 1 静止时恰
与立柱上的球 2 接触且两球等高。将球 1 拉到 A 点,并使之静止,同时把球 2 放在立柱上。
释放球 1,当它摆到悬点正下方时与球 2 发生对心碰撞,碰后球 1 向左最远可摆到 B 点,球
2 落到水平地面上的 C 点。测出有关数据即可验证 1、2 两球碰撞时动量守恒。现已测出 A
点离水平桌面的距离为 a,B 点离水平桌面的距离为 b,C 点与桌子边沿间的水平距离为 c。
①还需要测量的量与符号是 、 、
和 。
②根据测量的数据,该实验中动量守恒的表达式为
(忽略小球的大小)。
答案:①弹性球 1 的质量 m1(1 分) 弹性球 2 的质量 m2(1 分) 立柱高 h(1 分) 桌面高 H(1
分) ②2m1 a-h=2m1 b-h+m2
c
H+h
(2 分)
解析:小球 1 从 A 处下摆过程只有重力做功,机械能守恒,根据机械能守恒定律,有 m1g(a
-h)=1
2m1v21,解得 v1= 2g(a-h),碰撞后小球 1 上升到最高点的过程中,机械能守恒,
根据机械能守恒定律,有 m1g(b-h)=1
2m1v22,解得 v2= 2g(b-h),碰撞后小球 2 做平抛
运动,t= 2(H+h)
g
,所以球 2 碰后速度 v3=c
t
=
c
2(H+h)
g
,该实验中动量守恒的
表达式为 m1v1=m1v2+m2v3,代入数据得 2m1 a-h=2m1 b-h+m2
c
H+h
,可见,还需要
测量的物理量是弹性球 1 的质量 m1、弹性球 2 的质量 m2、立柱高 h、桌面高 H。
相关文档
- 高考一轮复习物理选修35专题练习动2021-05-10 21:37:1117页
- 高考第一轮复习物理22匀速直线运动2021-04-28 19:09:4212页
- 高三一轮复习物理第5章《机械能及2021-04-27 18:19:156页
- 高三一轮复习物理第9章《电磁感应2021-04-27 11:24:587页
- 高考一轮复习物理单元检测九 电磁2021-04-26 01:20:227页
- 高三一轮复习物理第9章《电磁感应2021-04-19 22:06:5311页
- 高三一轮复习物理第3章《牛顿运动2021-04-19 20:02:534页
- 高三一轮复习物理第2章《相互作用2021-04-19 18:03:473页
- 高三一轮复习物理第4章《曲线运动2021-04-17 11:37:4312页
- 高三一轮复习物理第2章《相互作用2021-04-14 23:30:063页